

Myoelectricity continuous decoding method for man-machine natural driving angle of prosthetic wrist joint
A decoding method and wrist joint technology, applied in prosthetics, medical science, sensors, etc., can solve problems that cannot meet the needs of daily life, and achieve the effects of avoiding individual differences, high resolution, and high capture frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in further detail below in conjunction with accompanying drawing:
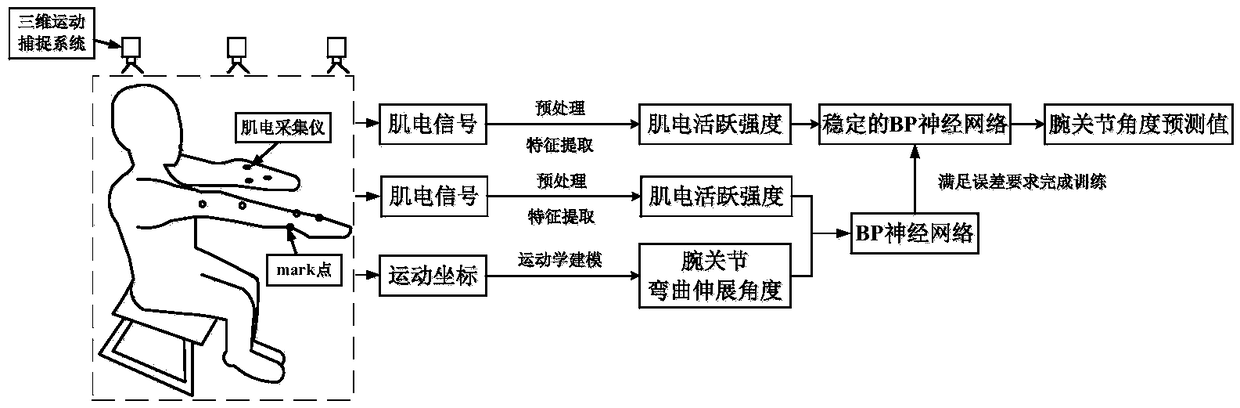
[0026] see figure 1 , the present invention uses a three-dimensional motion capture system to record the kinematics data of the healthy side wrist joint bending and stretching process, and calculates the angle of wrist joint bending and stretching; the electromyography instrument synchronously collects the surface electromyography signal of the forearm muscle on the residual side, and after preprocessing and feature extraction Obtain the feature of myoelectric activity; take the feature of myoelectric activity as the input of the BP neural network, and the angle of wrist joint flexion and extension as the output of the BP neural network, train the BP neural network, set the error range, and stop iteration after the error condition is met , to obtain a stable human-machine natural driving angle model of the arm decoding fake wrist joint; finally input the activity stren...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More