Mechanical arm and table tennis robot comprising mechanical arm
A mechanical arm and robot technology, applied in the field of robotics, can solve problems such as slow movement speed and slow hitting speed, and achieve the effect of increasing the hitting speed and improving the range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
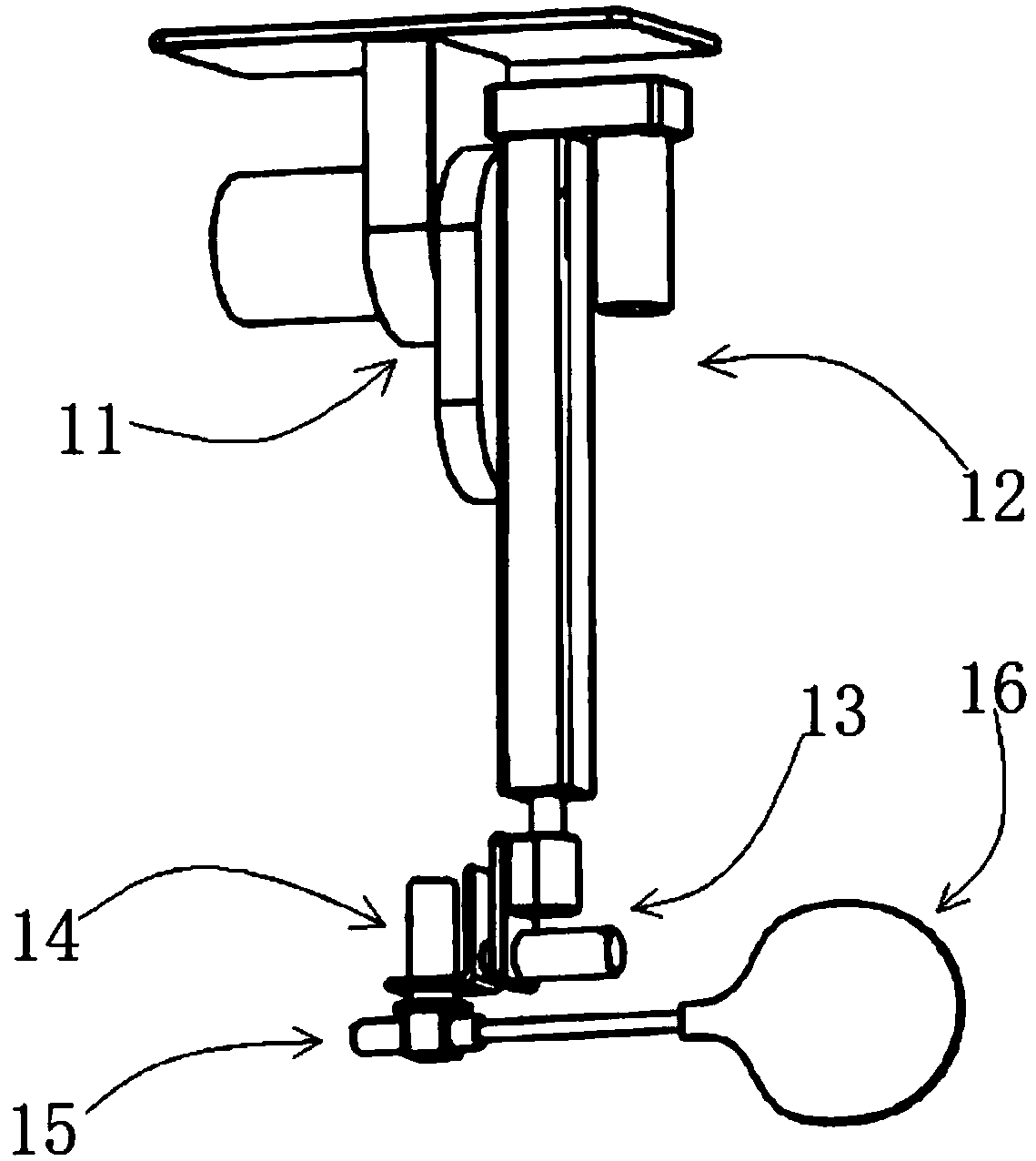
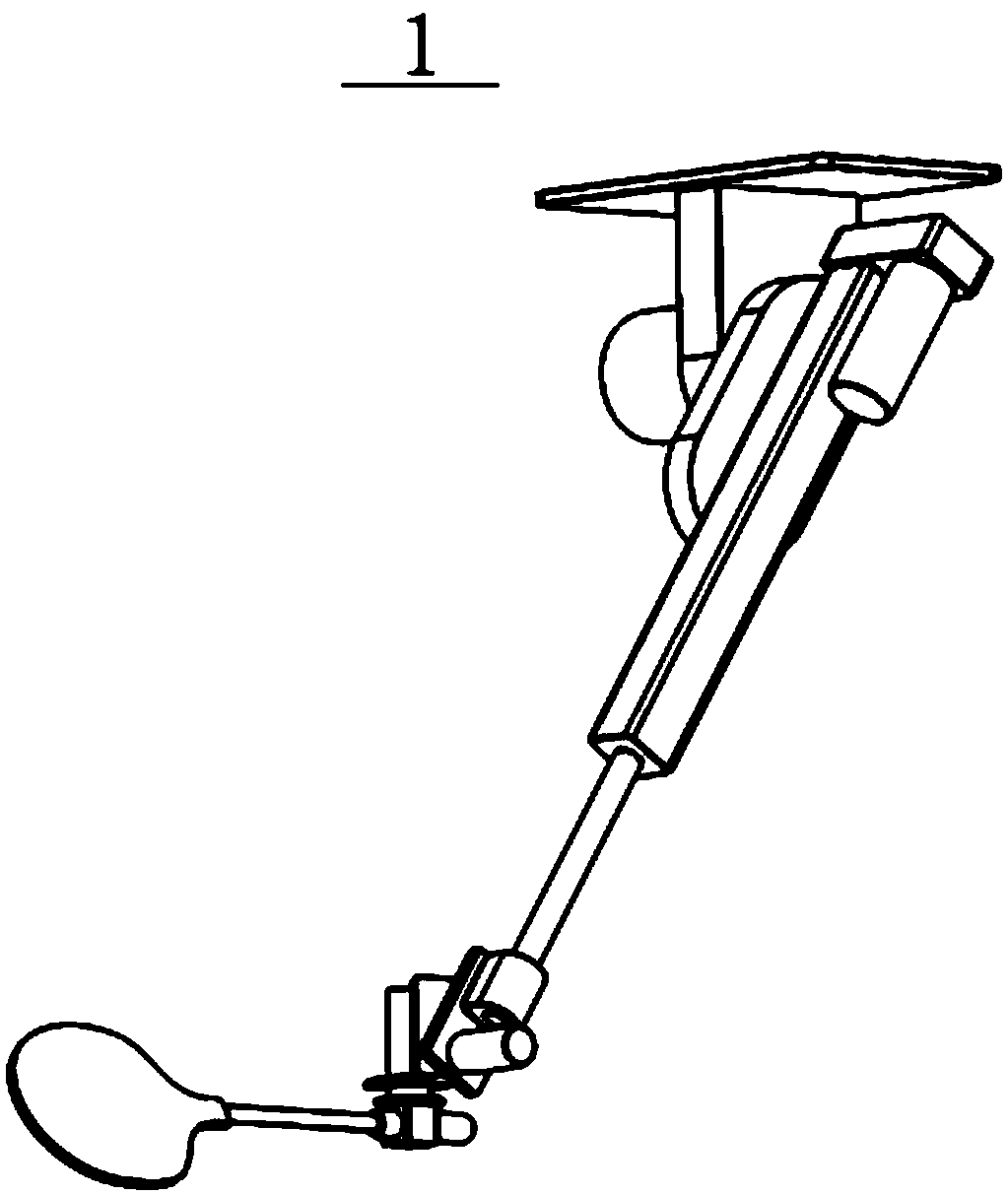
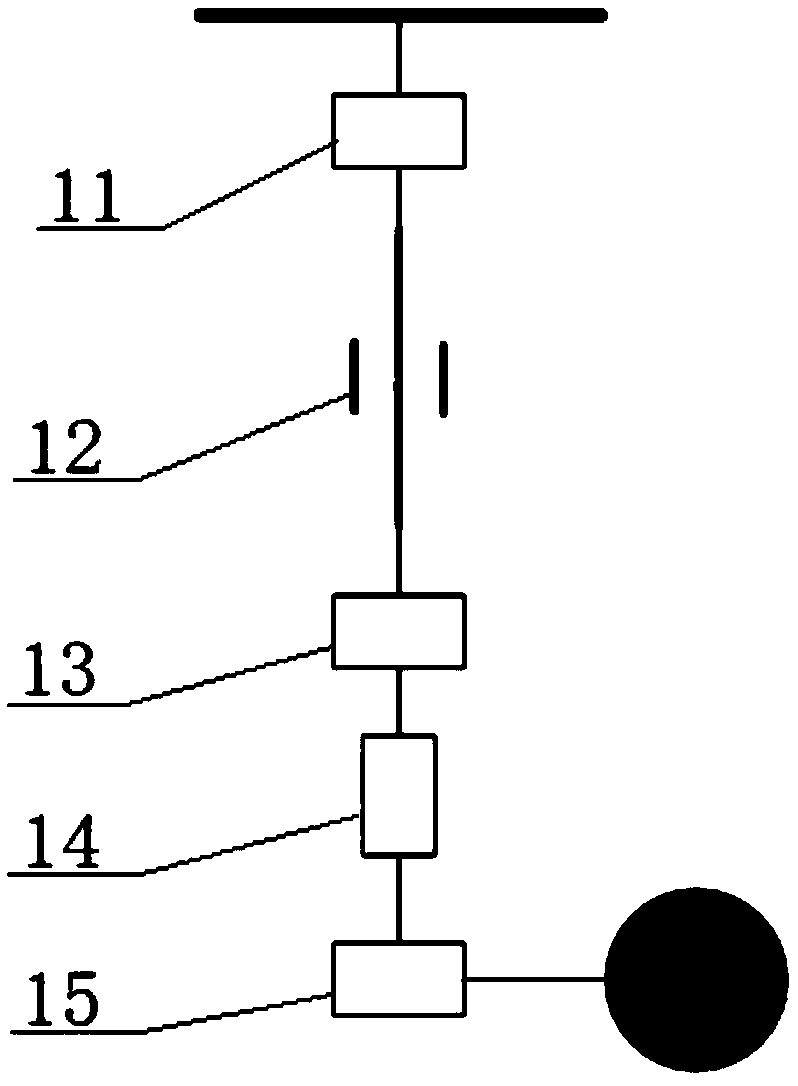
[0043] figure 1 Schematic diagram of the structure of the mechanical arm provided by the embodiment of the present invention, figure 2 It is a schematic diagram of the structure of the robot arm in use provided by the embodiment of the present invention, image 3 For the schematic diagram of the driving joint of the mechanical arm provided by the embodiment of the present invention, please refer to figure 1As shown in -3, this embodiment provides a mechanical arm. The mechanical arm 1 of this embodiment includes a first driving joint 11, a second driving joint 12, a third driving joint 13, a fourth driving joint 14, and a fifth driving joint 15 and an end effector 16, the first driving joint 11 is connected to the second driving joint 12, the second driving joint 12 is connected to the third driving joint 13, and the third driving joint 13 is connected to the The fourth drive joint 14 is connected, the fourth drive joint 14 is connected with the fifth drive joint 15, the ...
Embodiment 2
[0050] Figure 4 For the structural representation of the state of use of the table tennis robot provided by the embodiment of the present invention, please refer to figure 1 , 4 As shown, the present embodiment provides a table tennis robot, the table tennis robot includes a linear motion module 2 and a mechanical arm 1; when the table tennis robot is in use, the linear slide is located above the table tennis table, and the linear motion The module 2 includes a linear drive structure (not visible in the figure) and a linear slide rail 21, the mechanical arm 1 is fixed on the linear drive structure 2, and the linear slide rail 21 and the center line of the table tennis table 3 along the length direction parallel; the mechanical arm 1 is the mechanical arm described in the embodiment, wherein the end effector 16 is a table tennis racket.
[0051] In this embodiment, the linear motion module 2 can be hoisted above the table tennis table, or fixed above the table tennis table t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com