

Kalman filtering-based horizontal coordinate system strapdown inertial navigation system damping algorithm
A technology of Kalman filter and abscissa system, applied in navigation calculation tools, navigation through speed/acceleration measurement, etc., can solve problems such as breaking system balance, difficulty in determining damping network parameters, and large overshoot errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The present invention will be further described below in conjunction with the accompanying drawings.
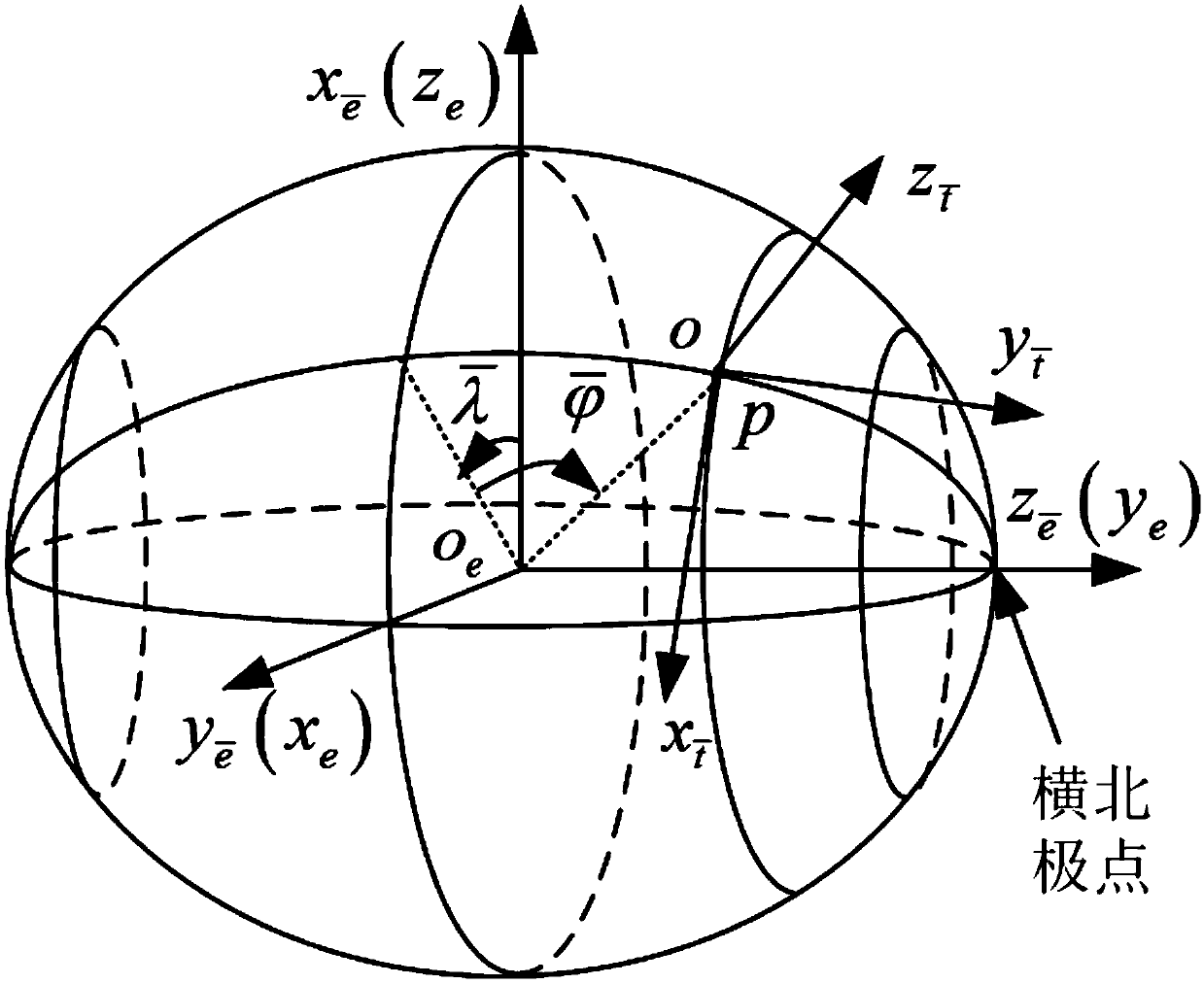
[0078] combine Figure 1 to Figure 7 , the present invention discloses a damping algorithm based on abscissa system strapdown inertial navigation system based on Kalman filter. The reliability of the degree information determines whether it can be switched from undamped to damped state. When the external velocity signal is valid, the abscissa system SINS switches to the Kalman filter damped state; finally, after the filter stabilizes, it will estimate The attitude error angle is constantly fed back and corrected to realize the external horizontal damping of the Kalman filter.
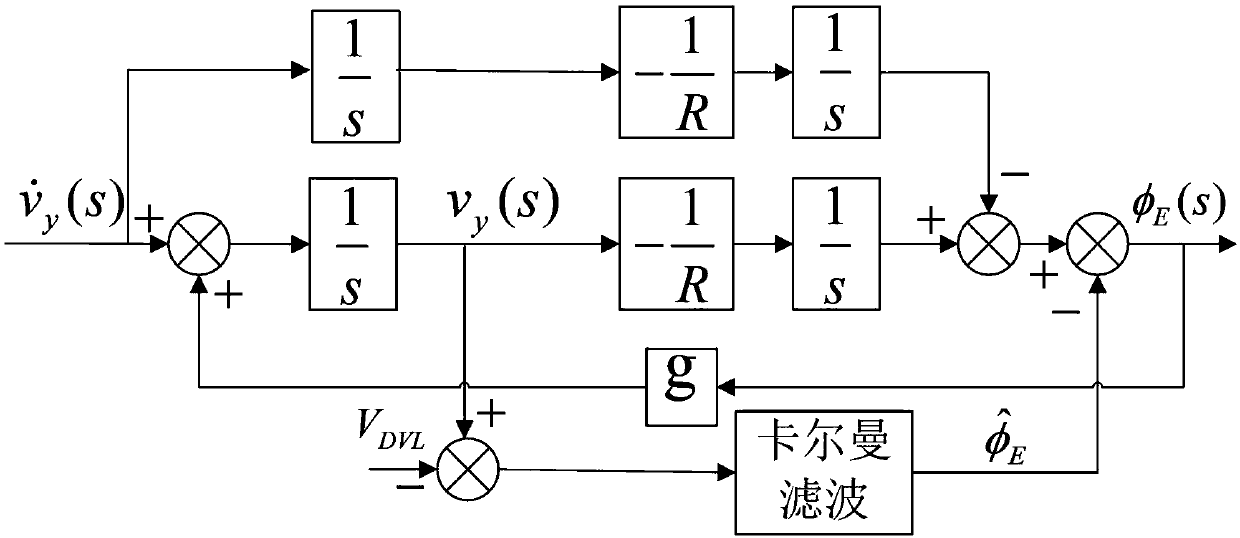
[0079] figure 2 It is the block diagram of the Kalman filter damping principle of the strapdown inertial navigation system in the abscissa system. Usually, the external speed error provided by the log has a staged constant value error, which makes the estimated speed error and the external s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More