

Multi-axis robot point-position synchronous control method and system based on s-curve acceleration and deceleration
A multi-axis robot and synchronous control technology, applied in the direction of digital control, electrical program control, etc., can solve problems such as lack of solutions, and achieve the effects of strict consistency of running time, smooth operation, and continuous acceleration
Active Publication Date: 2019-10-01
山东易码智能科技股份有限公司
View PDF7 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
To sum up, there is still a lack of effective solutions to the problem of how to efficiently and accurately realize the synchronous control of robot points in existing technologies
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
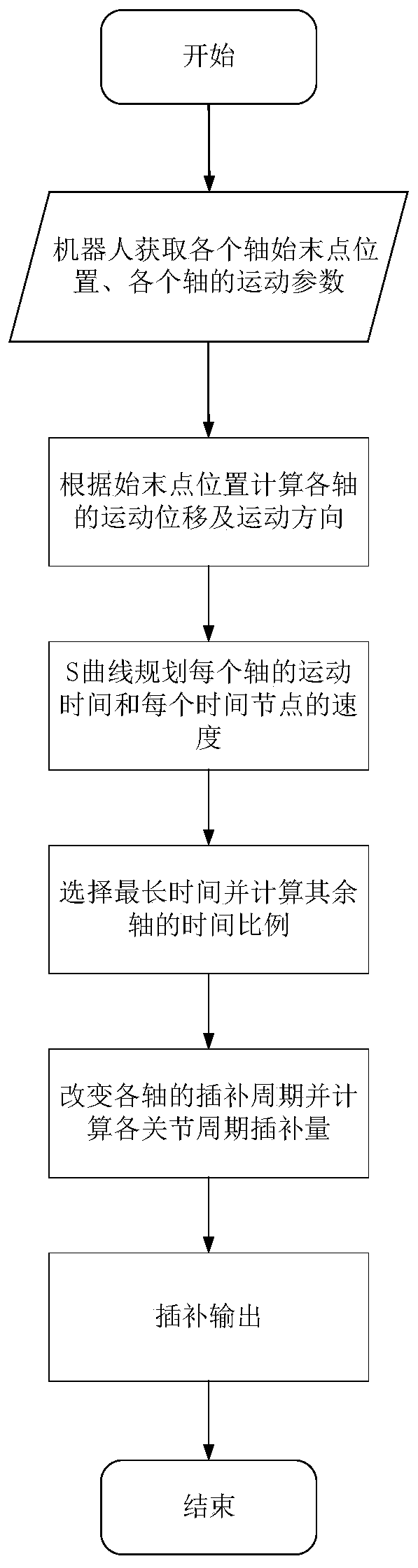
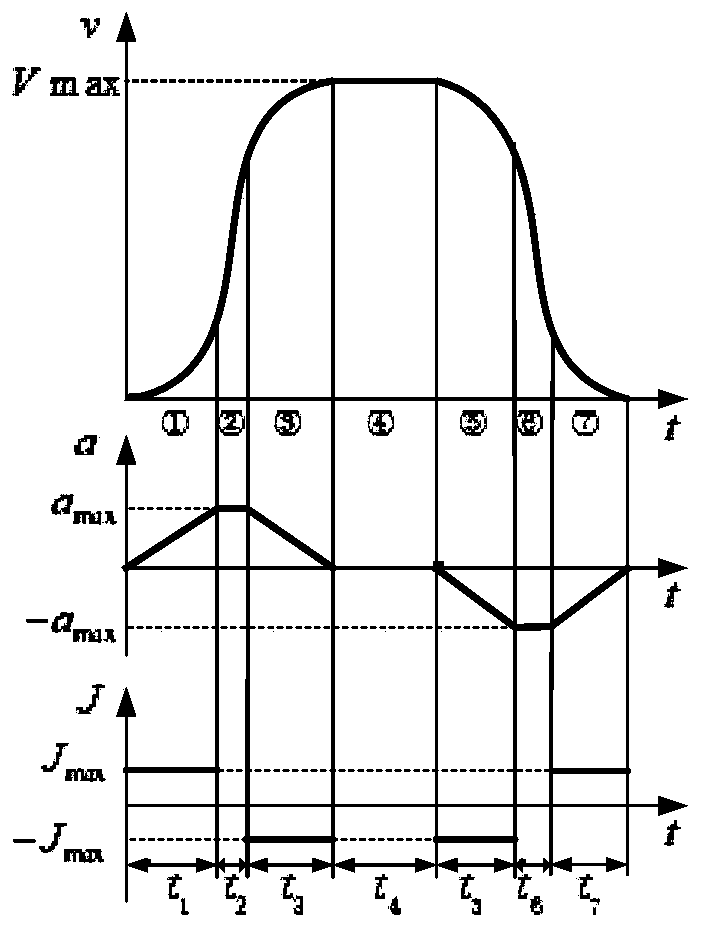
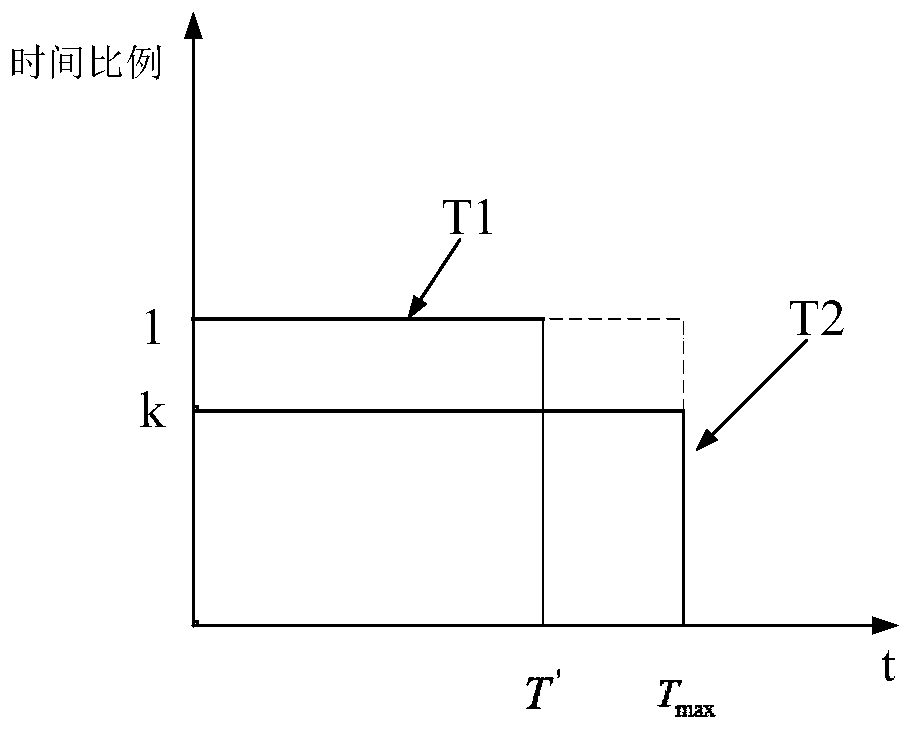
The invention discloses a multi-axis robot point position synchronous control method and system based on S curve acceleration and deceleration. An angle difference of each joint axis between two pointpositions of a multi-axis robot is calculated; under the condition of ensuring a preset movement characteristic of each axis to be maximum, speed planning is carried out on each joint axis by using the S curve acceleration and deceleration, movement time of each axis is obtained, the axis with the longest movement time is taken as a reference, and periodic interpolation displacements of other joints are calculated through time ratios of other joints to the reference, so that synchronous control is realized. According to the synchronous control method and system, the precision of the robot point position synchronous control is improved; the speed and the acceleration of the robot are ensured to be continuous; and the calculation amount is reduced.
Description
technical field The invention relates to the technical field of robot control, in particular to a multi-axis robot point-position synchronous control method and system based on S-curve acceleration and deceleration. Background technique Robot point-to-point control is divided into synchronous control and asynchronous control. Asynchronous point-to-point control means that the time for each joint axis of the robot to reach the target joint angle is different due to the difference in motion angle. In the case of different running angles, the running time is still consistent, which can make the end effector of the robot more stable and work more efficient. Among the existing methods, the Chinese patent document, application number 201210507592.7, the patent name is "A method and device for realizing synchronous point-to-point PTP movement in a robot", which discloses a robot with the longest running time as the reference axis , use the displacement ratio to determine the spee...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G05B19/414
Inventor张承瑞倪鹤鹏姬帅王公成
Owner山东易码智能科技股份有限公司