

Indoor human detection and tracking method based on RGB-D under low viewing angle
A technology of human body detection and perspective, applied in image data processing, instruments, calculations, etc., can solve problems such as feature loss, difficulty in human detection and tracking, and distinguish between human bodies and other objects, and achieve the effect of improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038]In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
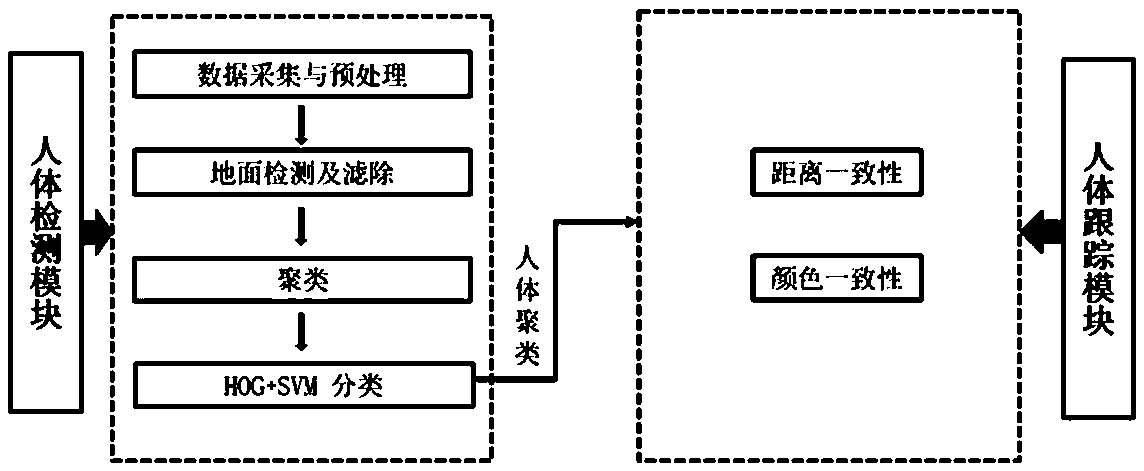
[0039] Such as figure 1 As shown, an indoor human detection and tracking method based on RGB-D low viewing angle, including the following steps,
[0040] Step a. Data collection and processing
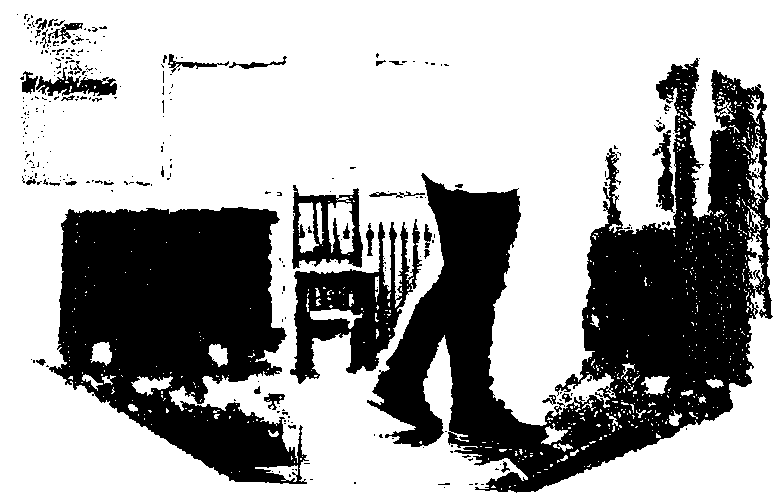
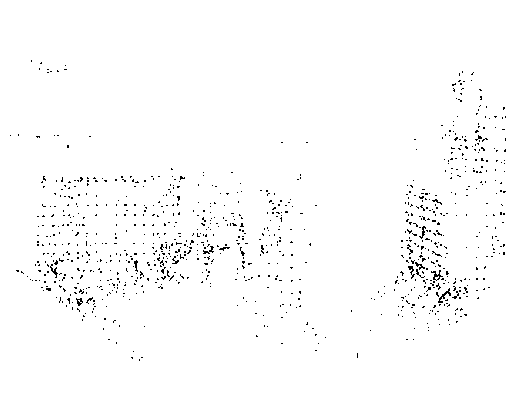
[0041] Such as figure 2 As shown in the figure, ASUS Xtion Pro is used for point cloud collection to obtain a dense 3D point cloud. Due to different error sources, especially the discretization effect in the depth measurement and the fact that the camera is calibrated within a certain range, there is a lot of noise in the acquired initial RGB-D point cloud, while each fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More