

Urology minimally invasive interventional surgery robot
A surgical robot and minimally invasive intervention technology, applied in surgical robotics, surgery, medical science, etc., can solve the problems of fatigue in operation posture, difficult operation, and no instructions or reports are found, and achieve the effect of relieving fatigue and improving operation speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
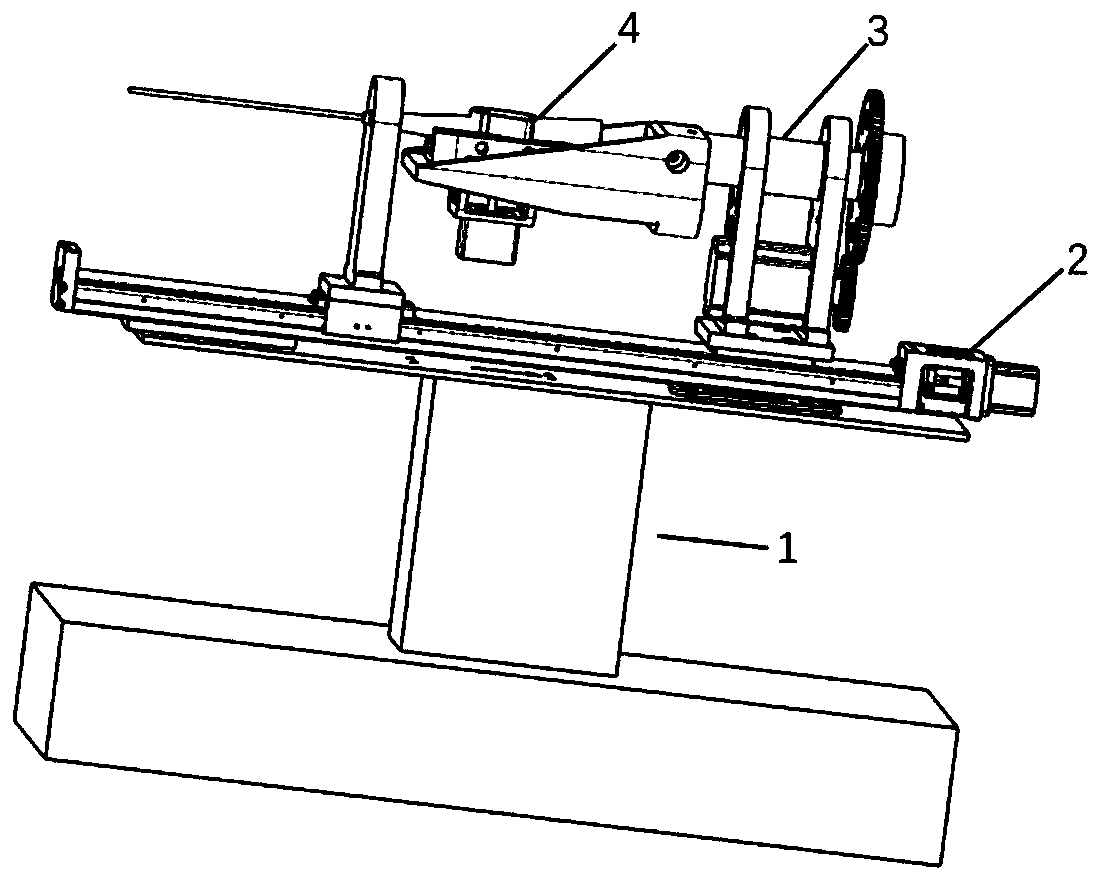
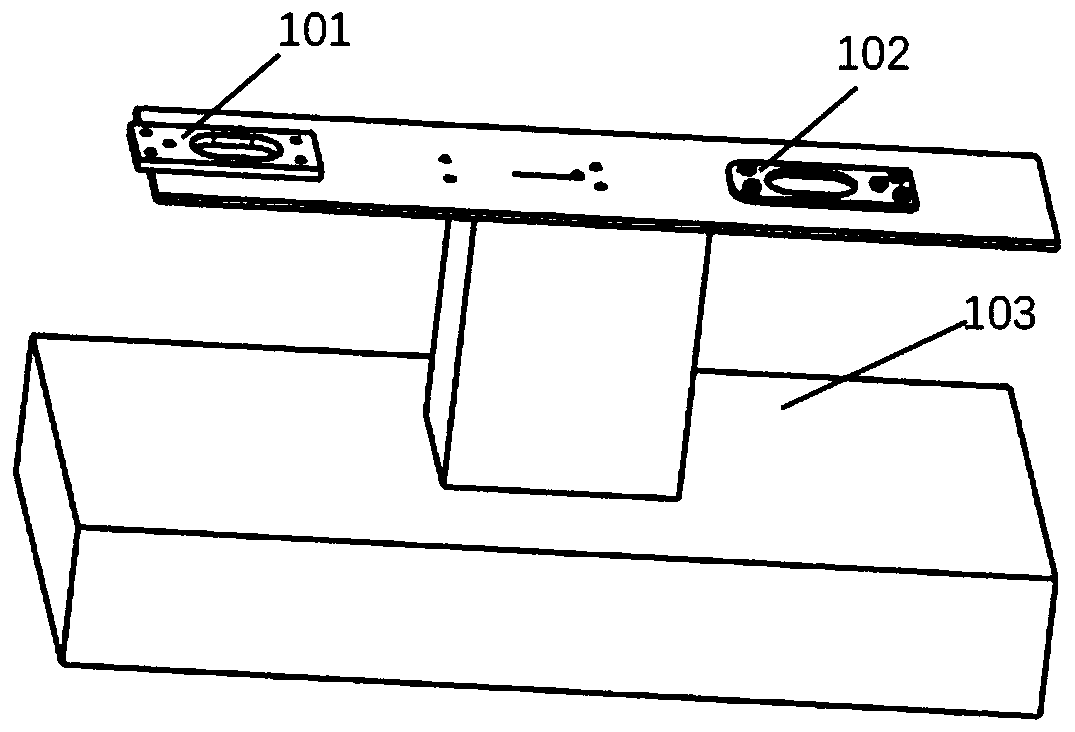
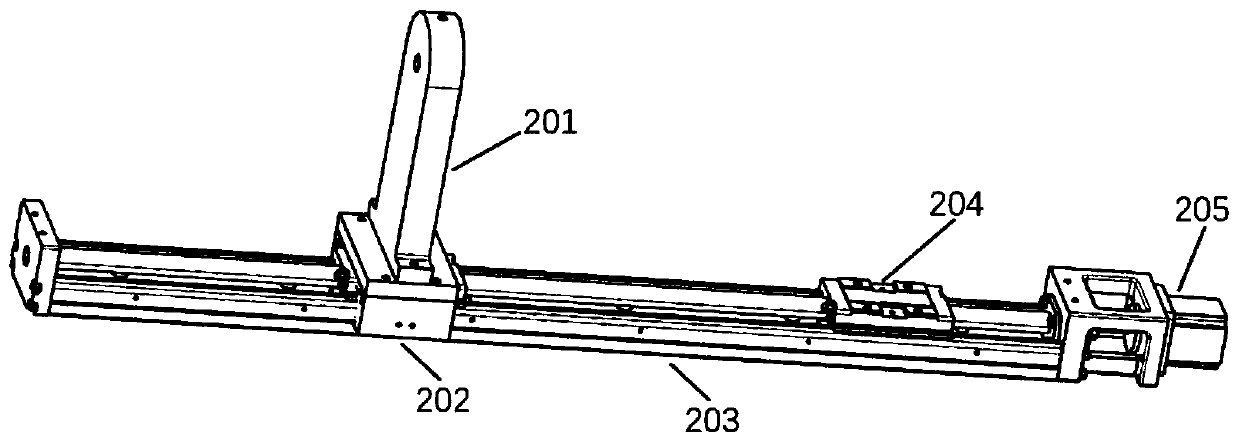
[0050] Such as Figure 1 to Figure 5 As shown, a schematic diagram of some embodiments of a minimally invasive interventional surgery robot in urology.
[0051] Such as figure 1 As shown, a minimally invasive interventional surgery robot in urology includes: a flexible mirror lifting module 1, a flexible mirror pushing module 2, a flexible mirror rotating module 3, and a flexible mirror bending module 4; wherein:
[0052] The flexible mirror lifting module 1 is used to adjust the vert...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More