

A rehabilitation lower extremity exoskeleton
An exoskeleton and lower limb technology, applied in the field of rehabilitation robots, can solve problems such as the need to increase driving power, the inertia of the lower limbs is large, and there is no rehabilitation training, so as to reduce the power demand, smooth the motion curve, increase flexibility and wear. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
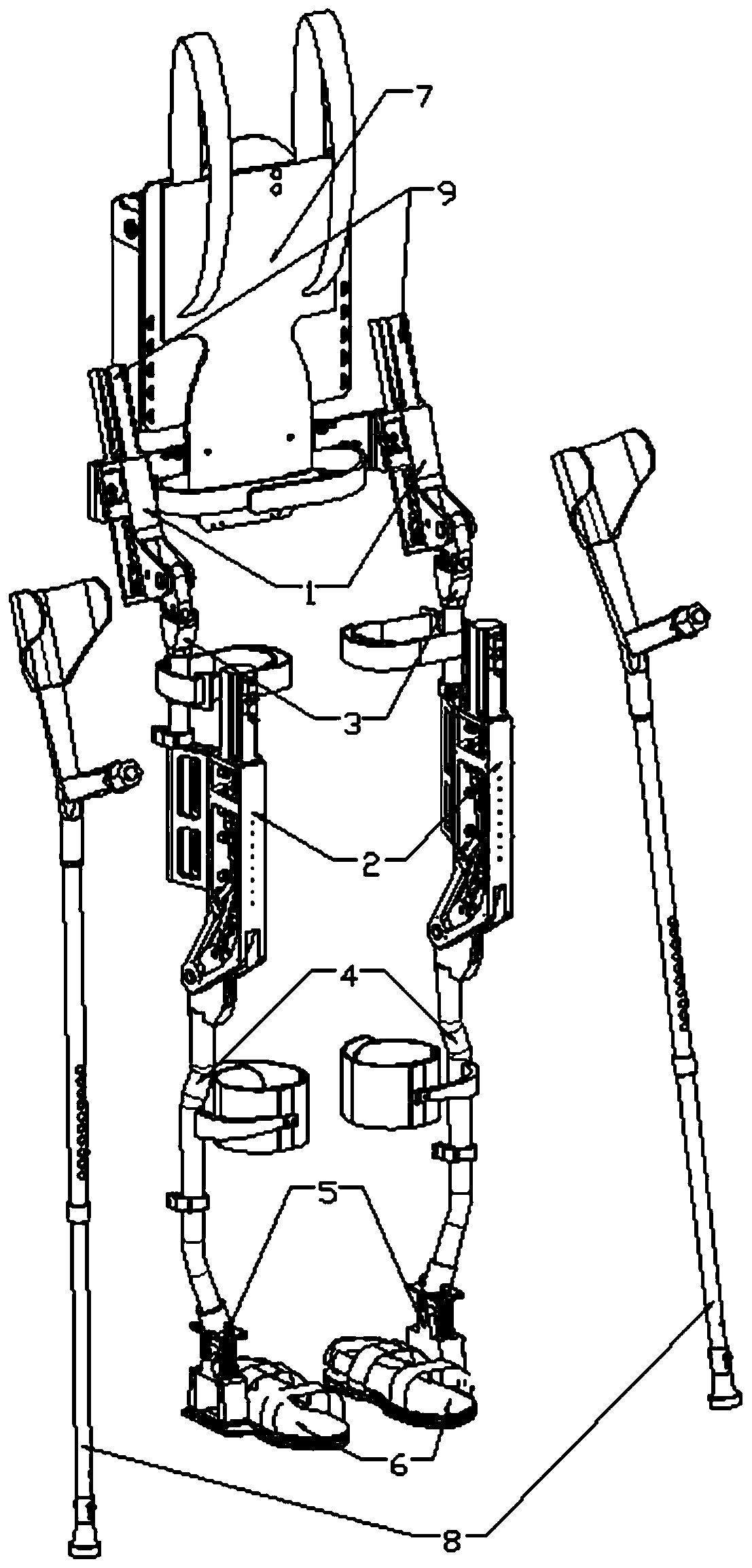
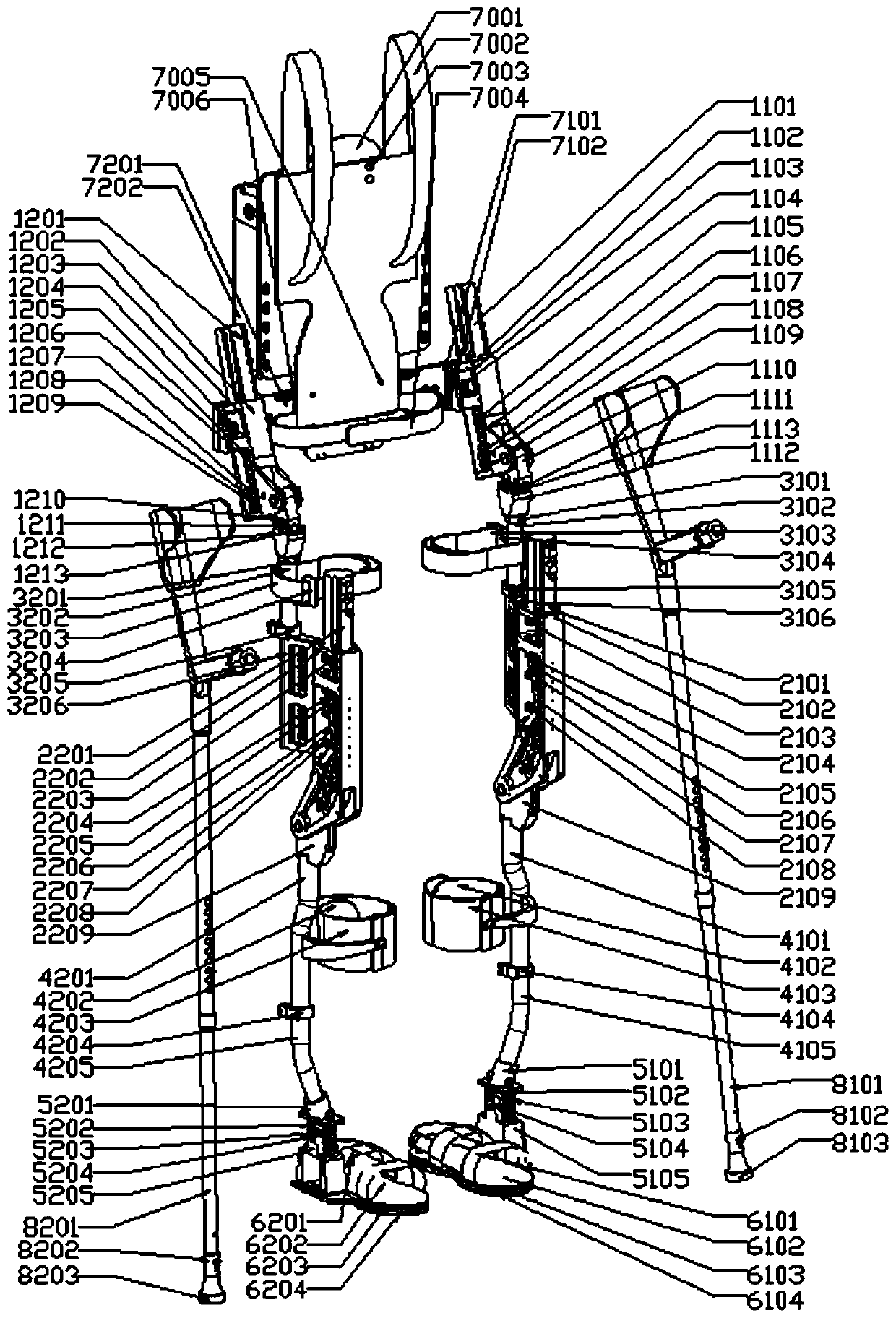
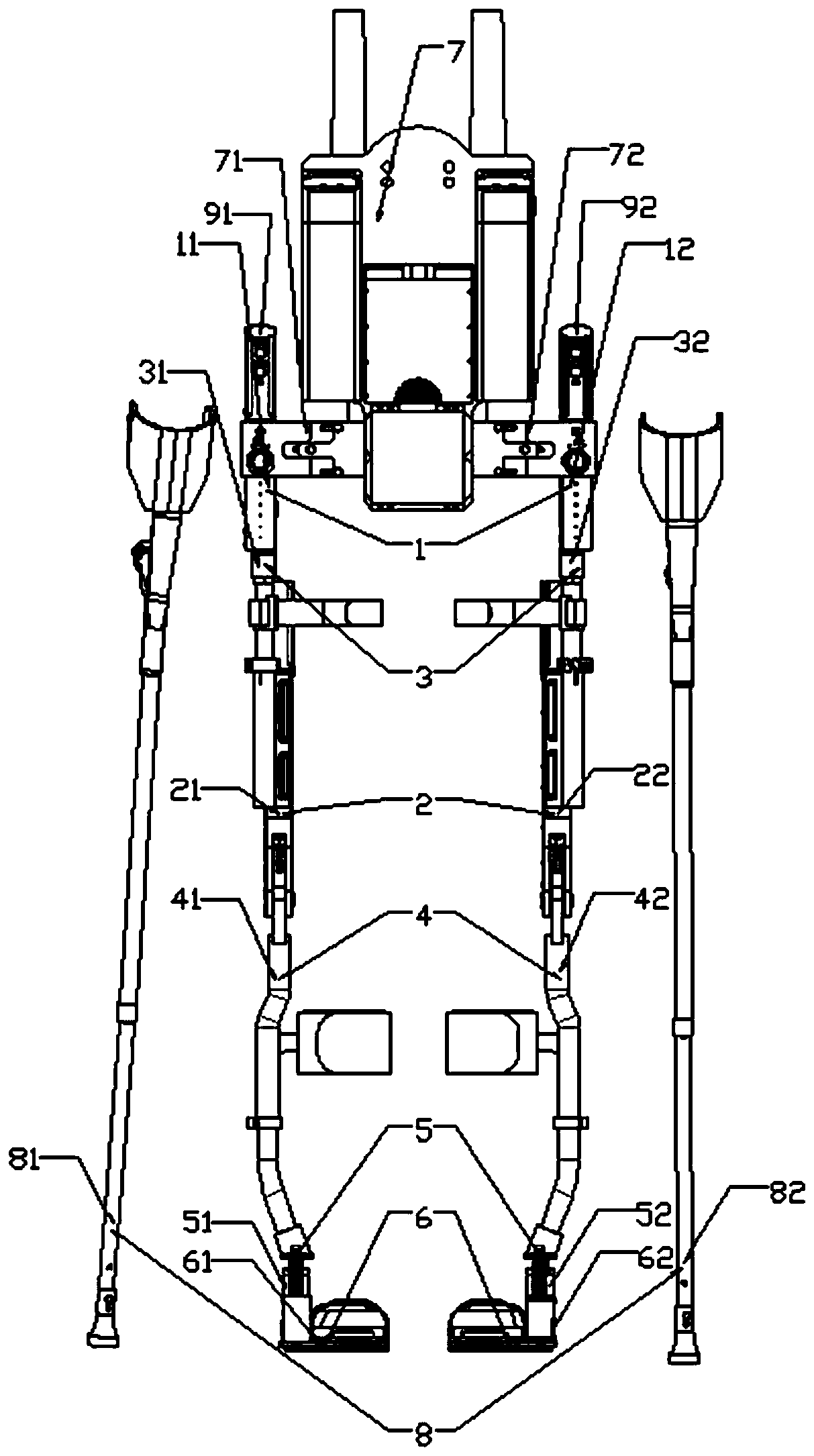
[0049] Such as Figure 1 to Figure 18As shown, the present invention provides a rehabilitation lower extremity exoskeleton, including two sets of exoskeleton mechanical legs 9, back frame module 7, and auxiliary elbow crutches 8 arranged symmetrically. The two sets of exoskeleton mechanical legs 9 are arranged on the back frame module 7 The upper belt adjustment modules 71 and 72 are connected, and each set of exoskeleton mechanical legs 9 includes a hip joint driver module 1, a thigh adjustment module 3 connected to the lower end of the hip joint driver module 1, and a knee joint driver connected to the lower end of the thigh adjustment module 3 Module 2, the calf adjustment module 4 connected to the lower end of the knee joint driver module 2, the ankle joint passive driver module 5 connected to the lower end of the calf adjustment module 4, the sensor shoe 6 connected to the lower end of the ankle joint passive driver module 5, and the back frame module 7 includes a backboa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More