Two-degree-of-freedom joint structure driven by three motors
A technology of joint structure and degrees of freedom, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve problems such as affecting transmission accuracy, impact, and difficulty in eliminating transmission gaps.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
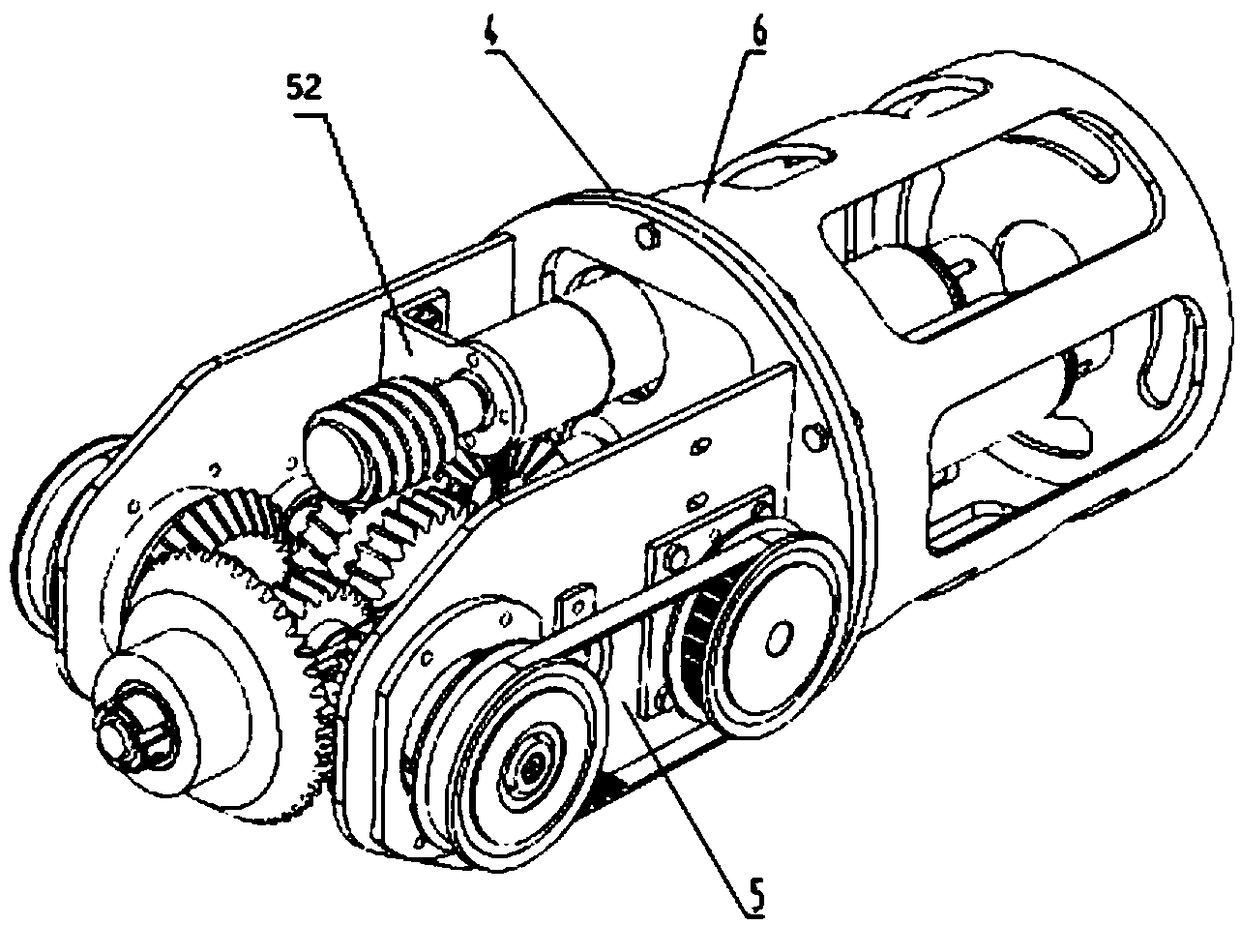
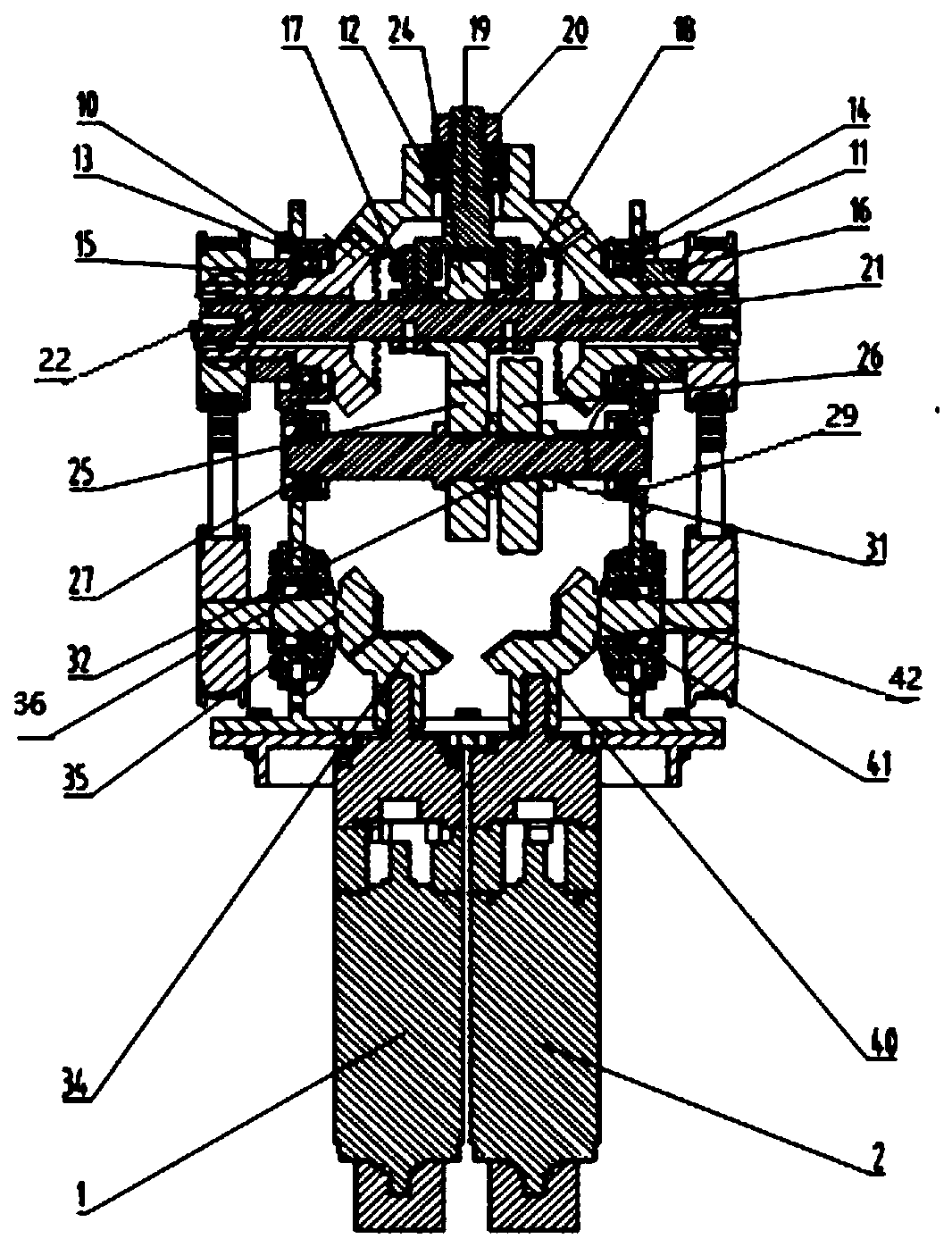
[0042] refer to Figure 1 ~ Figure 4 , A three-motor-driven two-degree-of-freedom joint structure provided by the present invention includes: a first transmission system, a second transmission system, an output system, a third transmission system, an intermediate connecting piece 4 , a frame 5 and a housing 6 .
[0043] first drive system
[0044] In the first transmission system, the first motor reducer 1 is fixedly connected to the intermediate connector 4 through screws, and the output shaft of the first motor reducer 1 is fixedly connected to the first transmission pinion bevel gear 34. Shaft connection, through set screw connection, etc. The first transmission large bevel gear 35 meshes with the first transmission small bevel gear 34 , and the former is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com