Feature map construction method, visual positioning method and corresponding device
A feature map and construction method technology, applied in the field of visual positioning, can solve the problems of high cost, unfavorable promotion of automatic driving technology, etc., and achieve the effect of reducing the cost of use and peacekeeping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
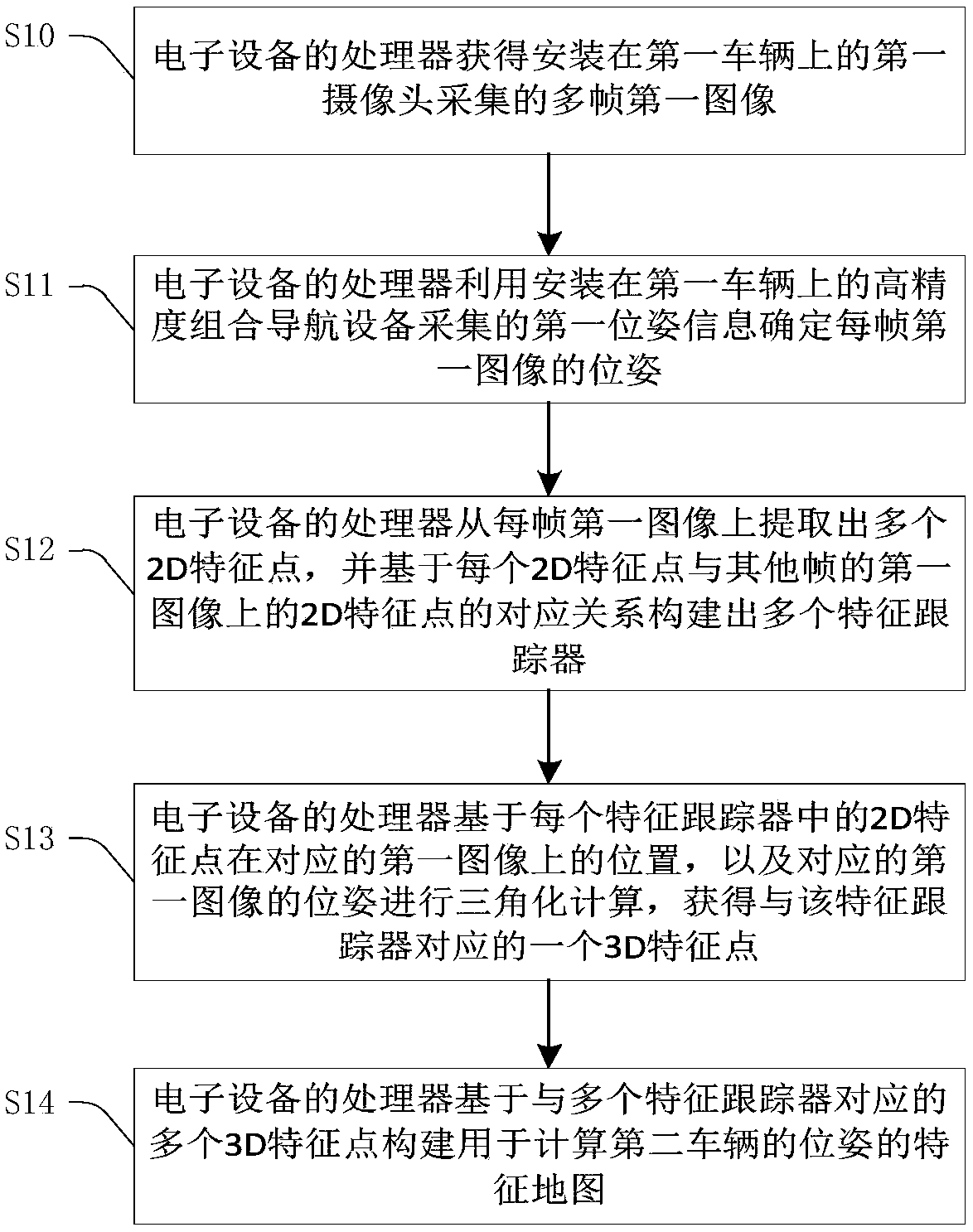
[0075] figure 2 A flow chart of the feature map construction method provided by the first embodiment of the present invention is shown. refer to figure 2 , the method includes:
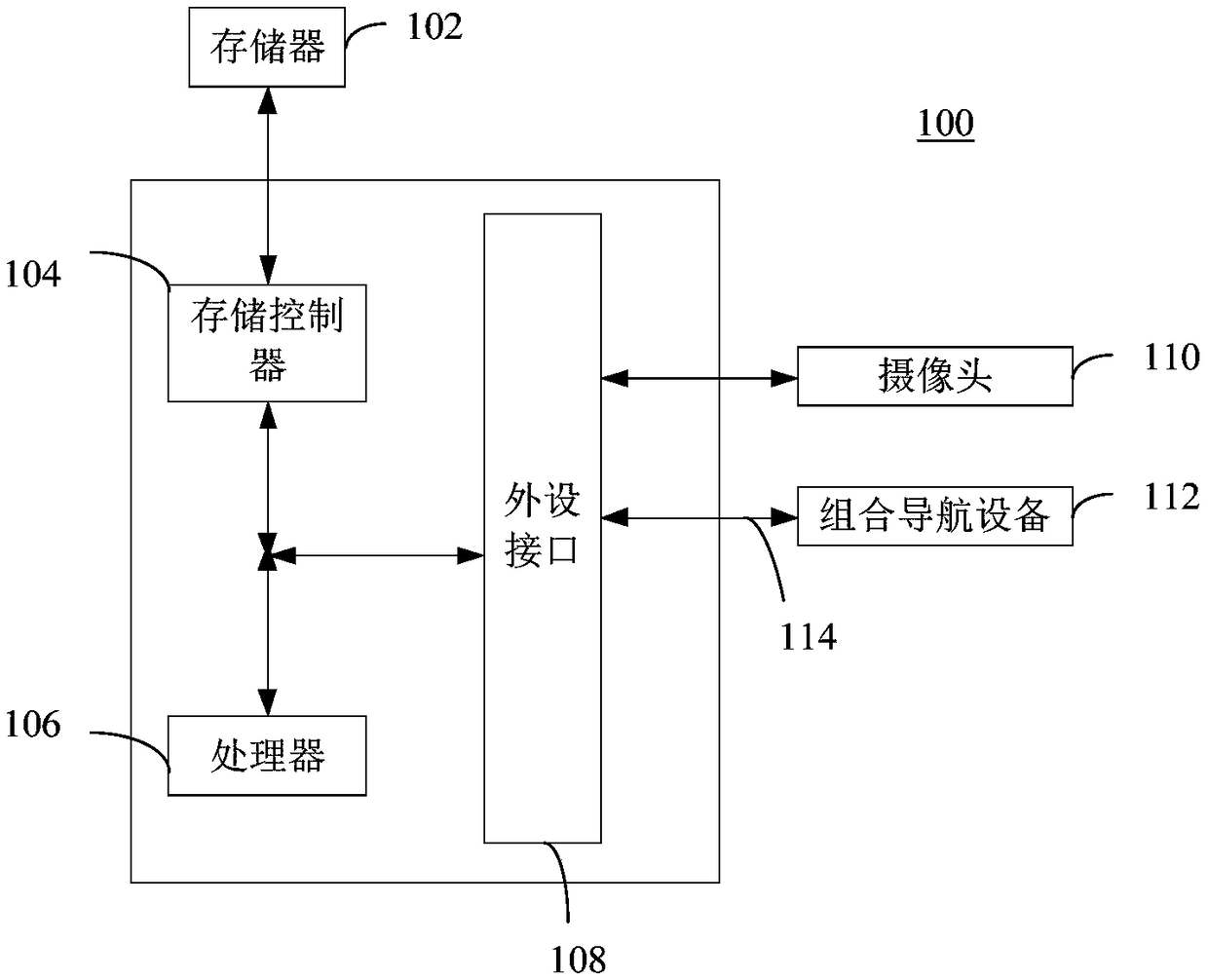
[0076] Step S10: The processor 106 of the electronic device 100 obtains multiple frames of first images captured by the first camera installed on the first vehicle.
[0077] The feature map to be constructed by this method is usually aimed at a specific scene (the environment in which the vehicle is located), for example, the scene determined by the pre-planned vehicle driving route. Acquiring multiple frames of first images around the first vehicle. The electronic device 100 can be placed on the first vehicle, and the collected multiple frames of first images are input to the electronic device 100 for processing in real time; or the electronic device 100 can also be at the remote end, and the first vehicle communicates with the electronic device 100 through a wireless communication network conn...
no. 2 example
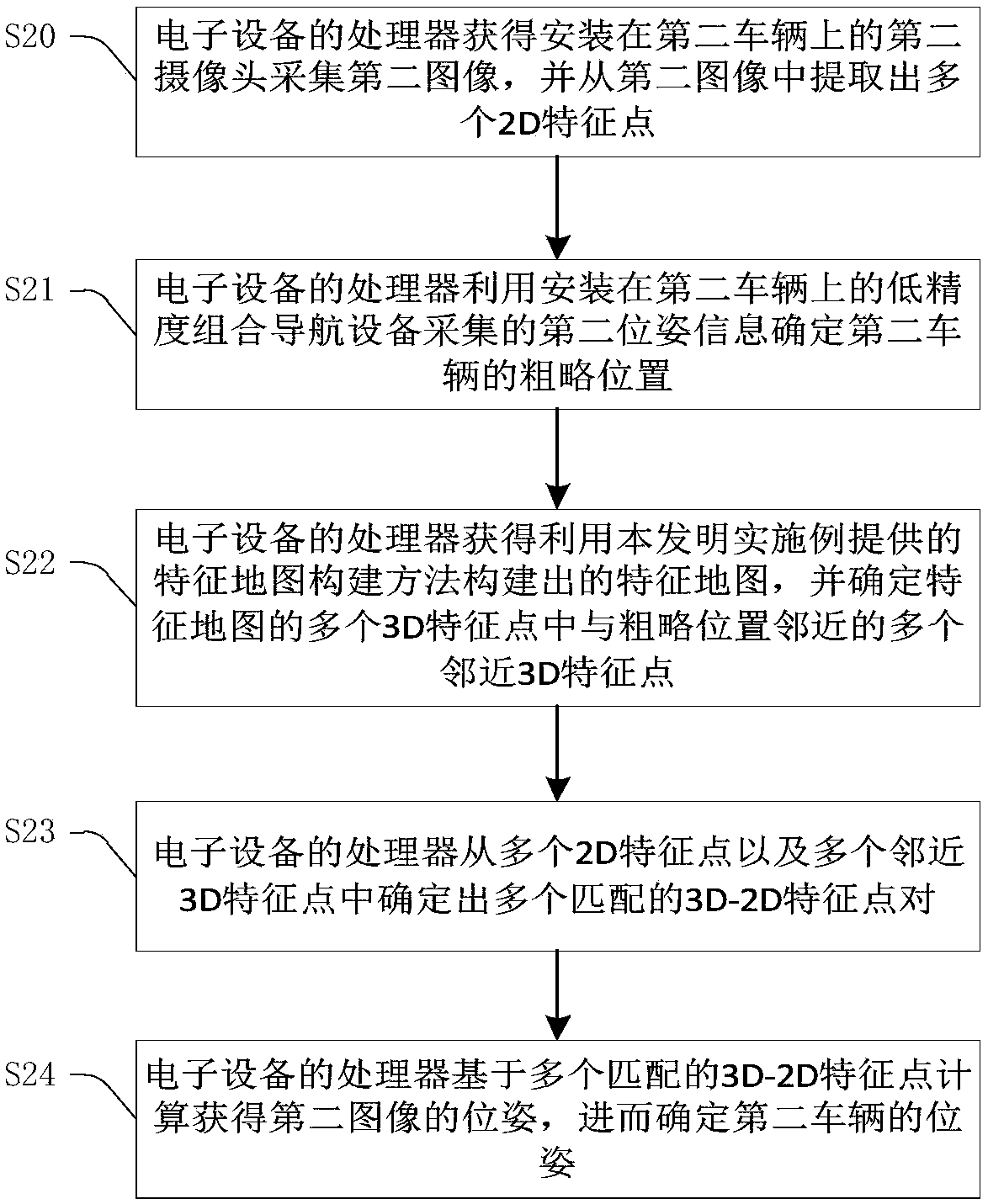
[0103] image 3 A flow chart of the visual positioning method according to the second embodiment of the present invention is shown. refer to image 3 , the method includes:
[0104] Step S20: The processor 106 of the electronic device 100 acquires a second image captured by a second camera installed on a second vehicle, and extracts a plurality of 2D feature points from the second image.
[0105] The visual positioning method in the second embodiment performs visual positioning on each frame of image captured by the second camera, and for the convenience of explanation, one frame of image is referred to as the second image. For the method of extracting 2D feature points from the second image, reference may be made to the relevant description in the first embodiment, and the description will not be repeated.
[0106] Step S21: The processor 106 of the electronic device 100 uses the second pose information collected by the low-precision integrated navigation device installed ...
no. 3 example
[0125] Figure 4 A functional block diagram of the feature map construction apparatus 200 provided by the third embodiment of the present invention is shown. refer to Figure 4 , the device consists of:
[0126] The first image collection module 210 is configured to obtain multiple frames of first images collected by the first camera mounted on the first vehicle;
[0127] The first image pose calculation module 220 is used to determine the pose of each frame of the first image using the first pose information collected by the high-precision integrated navigation device installed on the first vehicle;
[0128] The feature point tracking module 230 is configured to extract multiple 2D feature points from the first image of each frame, and construct multiple features based on the correspondence between each 2D feature point and the 2D feature points on the first image of other frames Trackers, wherein each feature tracker includes at least one 2D feature point with a correspon...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap