

Stereoscopic imaging method and device based on drone
A stereoscopic imaging and unmanned aerial vehicle technology, applied in stereoscopic systems, image communications, electrical components, etc., can solve the problems of high cost, large distance between binocular cameras, limited application of binocular cameras, etc., and achieve the goal of reducing imaging resolution demand, the effect of improving the accuracy of 3D reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
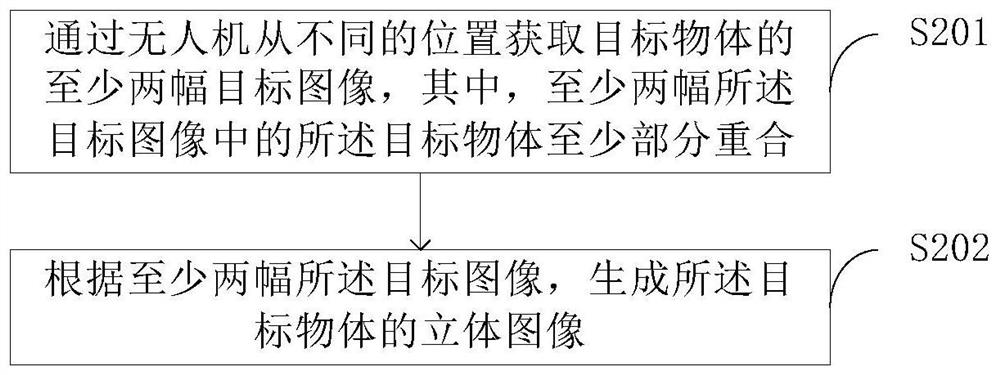
[0028] Embodiment 1 of the present invention provides a stereoscopic imaging method based on a drone. figure 2 It is a flow chart of the stereoscopic imaging method based on the drone provided by the embodiment of the present invention. Such as figure 2 As shown, the stereoscopic imaging method based on unmanned aerial vehicle may comprise the steps:
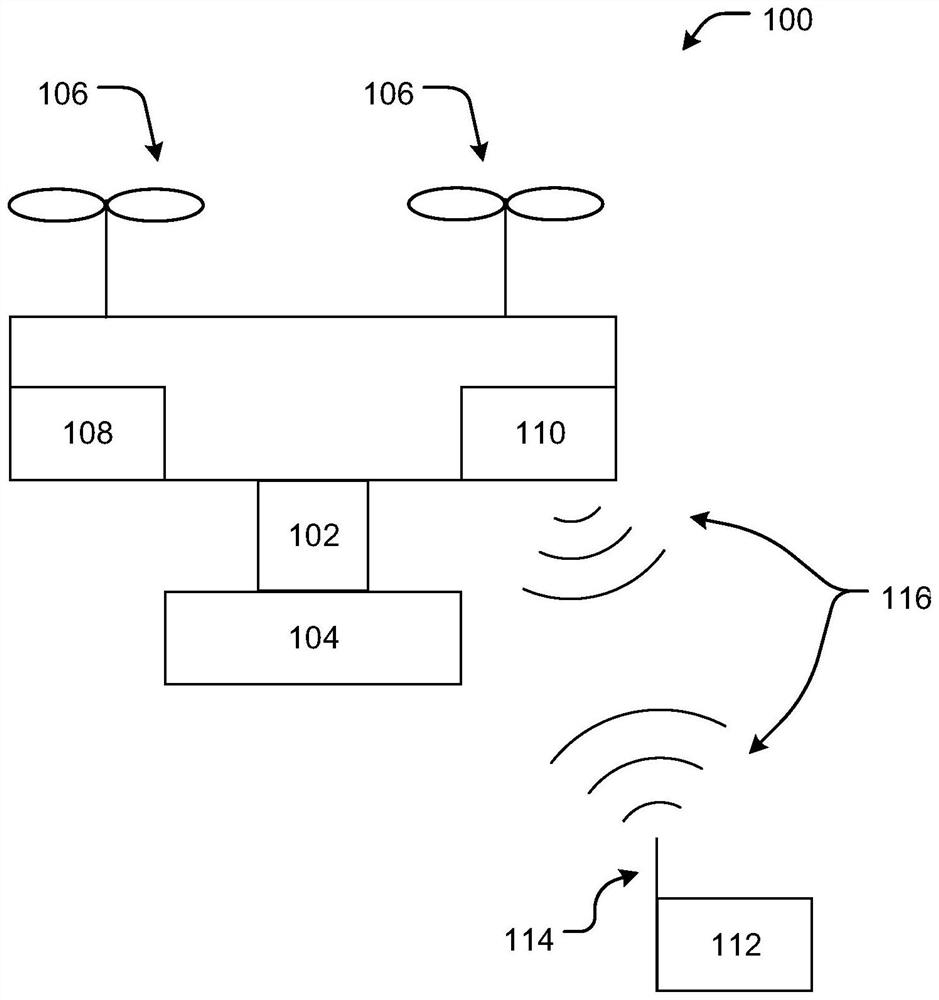
[0029] Step S201: Obtain at least two target images of the target object from different positions by the UAV 100, wherein the target object in the at least two target images at least partially overlap;
[0030] Optionally, the at least two target images may include two or more. Preferably, the drone 100 acquires two target images of the target object from different positions.
[0031] In this embodiment, the UAV 100 acquires two target images of the target object from different positions, and the specific implementation methods may include the following two types:
[0032] The first
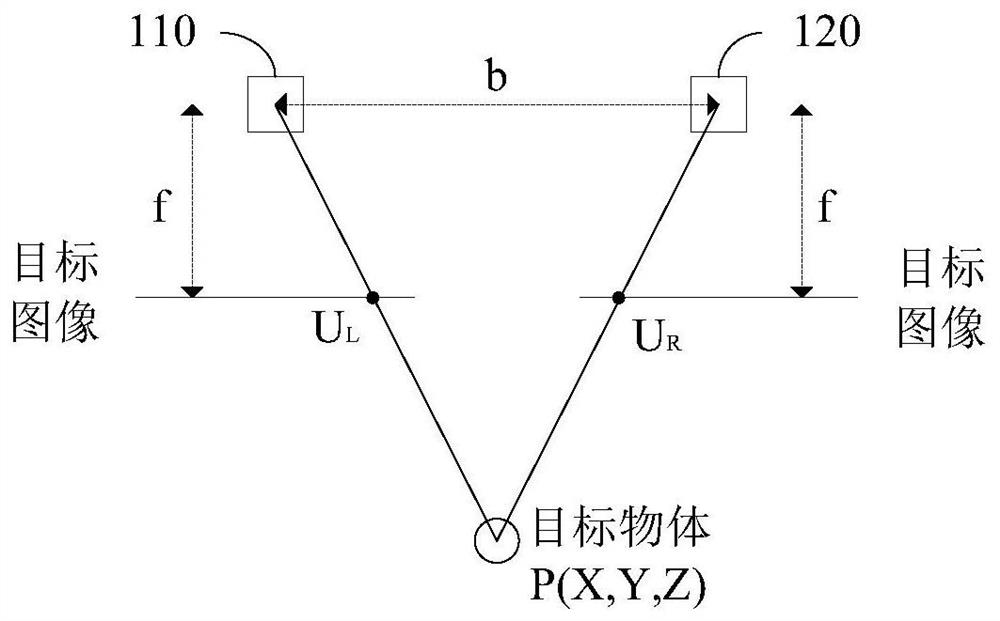
[0033] combine image 3 and Figure 4 ...
Embodiment 2
[0058] combine Figure 6 and Figure 7, Embodiment 2 of the present invention provides a stereoscopic imaging device based on a drone, the device may include a drone 100 and a processor 200 (for example, a single-core or multi-core processor), the processor 200 and the The drone 100 is connected in communication.
[0059] The processor 200 may be a central processing unit (central processing unit, CPU). The processor 200 may further include a hardware chip. The aforementioned hardware chip may be an application-specific integrated circuit (application-specific integrated circuit, ASIC), a programmable logic device (programmable logic device, PLD) or a combination thereof. The above-mentioned PLD may be a complex programmable logic device (complex programmable logic device, CPLD), a field-programmable gate array (field-programmable gate array, FPGA), a general array logic (generic array logic, GAL) or any combination thereof.
[0060] The processor 200 may include one or mo...
Embodiment 3
[0089] Embodiment 3 of the present invention provides a computer-readable storage medium, on which a computer program is stored, and the program is executed by a processor in the steps of the UAV-based stereoscopic imaging method described in Embodiment 1 above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More