

Wearable flexible walking assistance robot control system and method
A control system and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of flexible walking aids such as lack of control systems, poor coordination, and danger of falling, so as to improve walking characteristics and quality of life, wearable Convenience and weight-reducing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
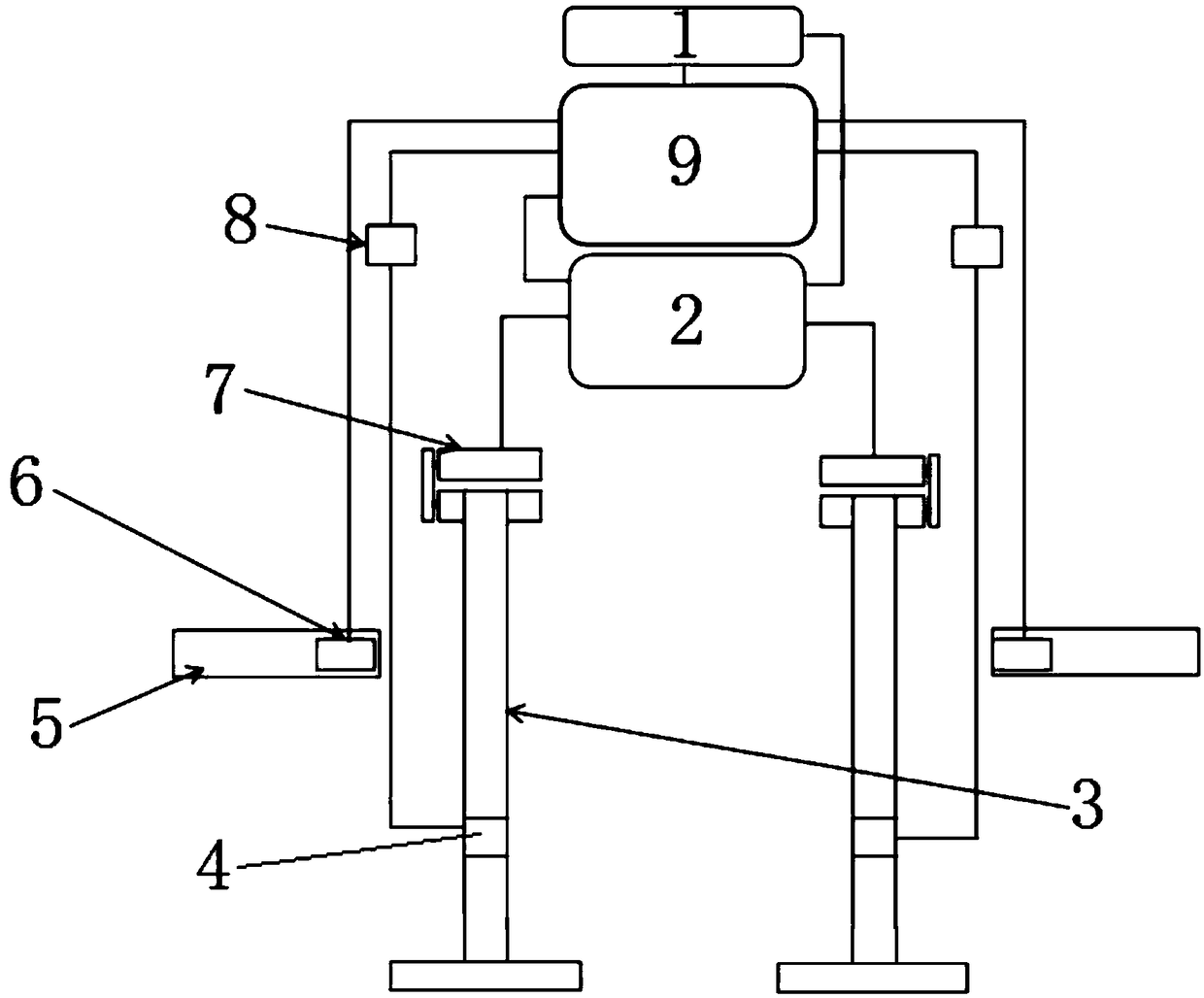
[0020] The present invention provides a wearable flexible walking assist robot control system (referred to as the system, see figure 1 ), characterized in that the system includes a power supply 1, a motor driver 2, a traction belt 3, a force sensor 4, a textile belt 5, a gyroscope 6, a driving device 7, a force sensor amplifier 8 and a controller 9;
[0021] The controller 9 and the motor driver 2 are placed on the user's waist; two gyroscopes 6 are respectively placed in the middle of the back of the user's left and right thighs (preferably at the hip joint) through the textile belt 5, and the gyroscope 6 Vertical to the ground, used for real-time collection of user's gait characteristic information, measuring real-time angular velocity ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More