

Locating method for non-cooperative targets in images of Martian surface
A technology based on non-cooperative targets and Mars, which is applied in the field of positioning of non-cooperative targets on Mars surface images, can solve the problems of long period of positioning information determination, difficulty in obtaining target information benchmarks, limited prior information, etc., to increase output The effect of potency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
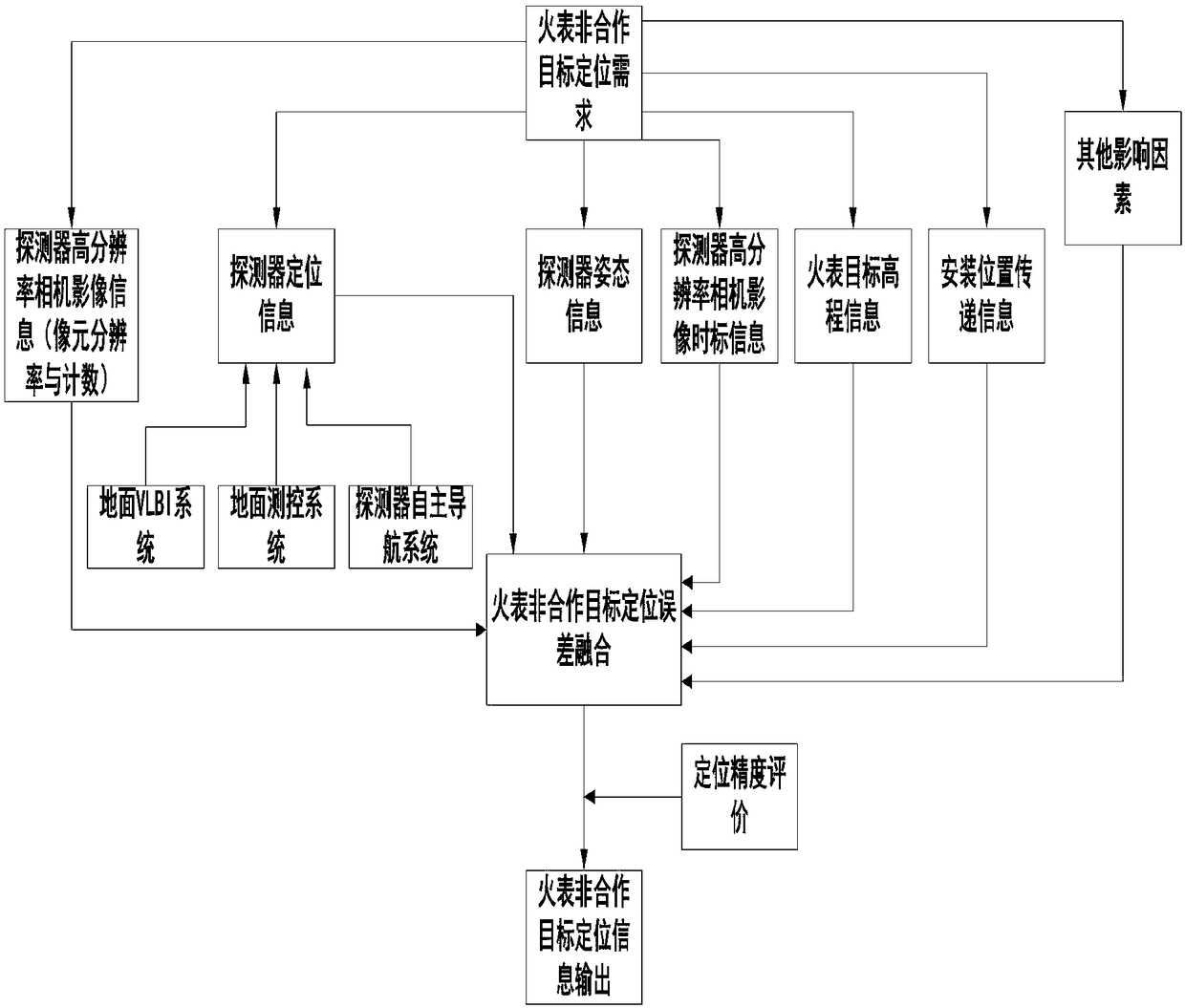
[0020] Such as figure 1 As shown, the positioning method of the Mars surface image non-cooperative target of the present invention comprises the following steps:
[0021] Step 1: The ground application system of the Mars exploration mission is responsible for proposing the acquisition task of Mars surface image position positioning information for specific Mars surface targets, and delineating the target area according to the image information obtained by the high-resolution camera;
[0022] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More