

Hop searching based conflict-avoiding path planning method for multiple robots
A path planning and conflict avoidance technology, which is applied to instruments, motor vehicles, vehicle position/route/height control, etc., can solve the problems of low efficiency of system planning conflict-free paths and high time complexity of search algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with accompanying drawing:
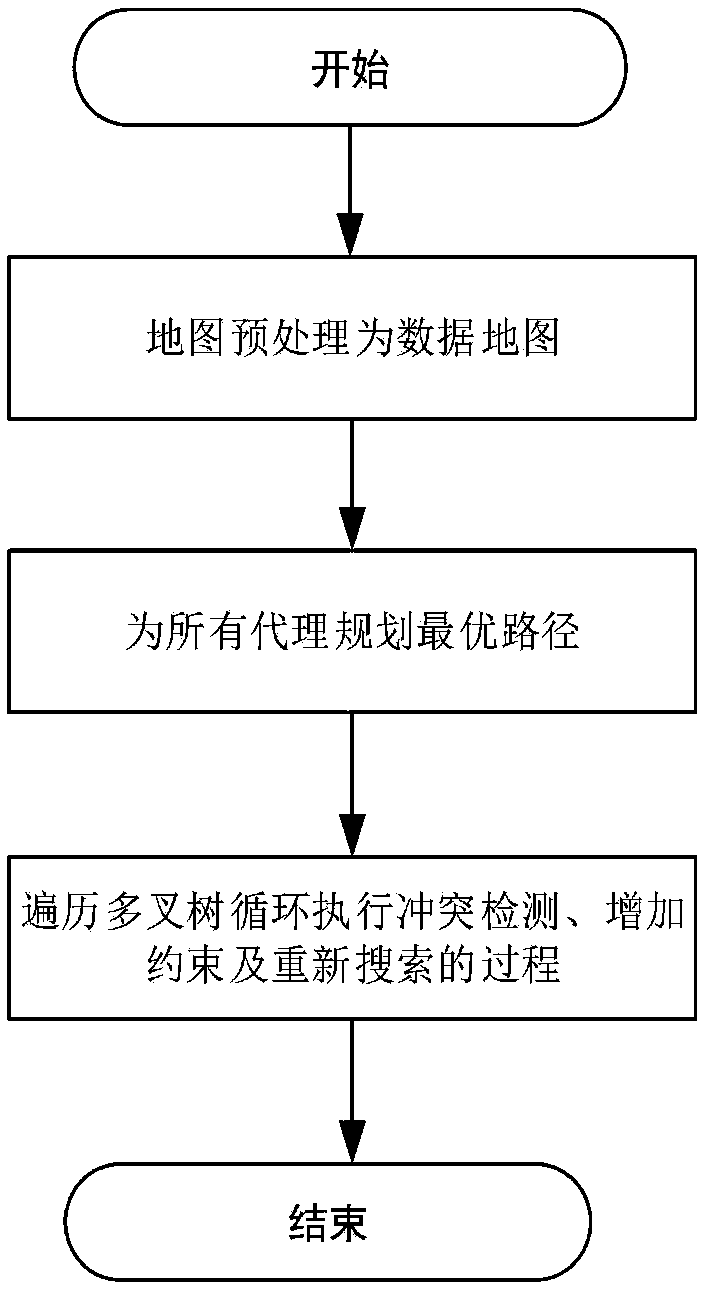
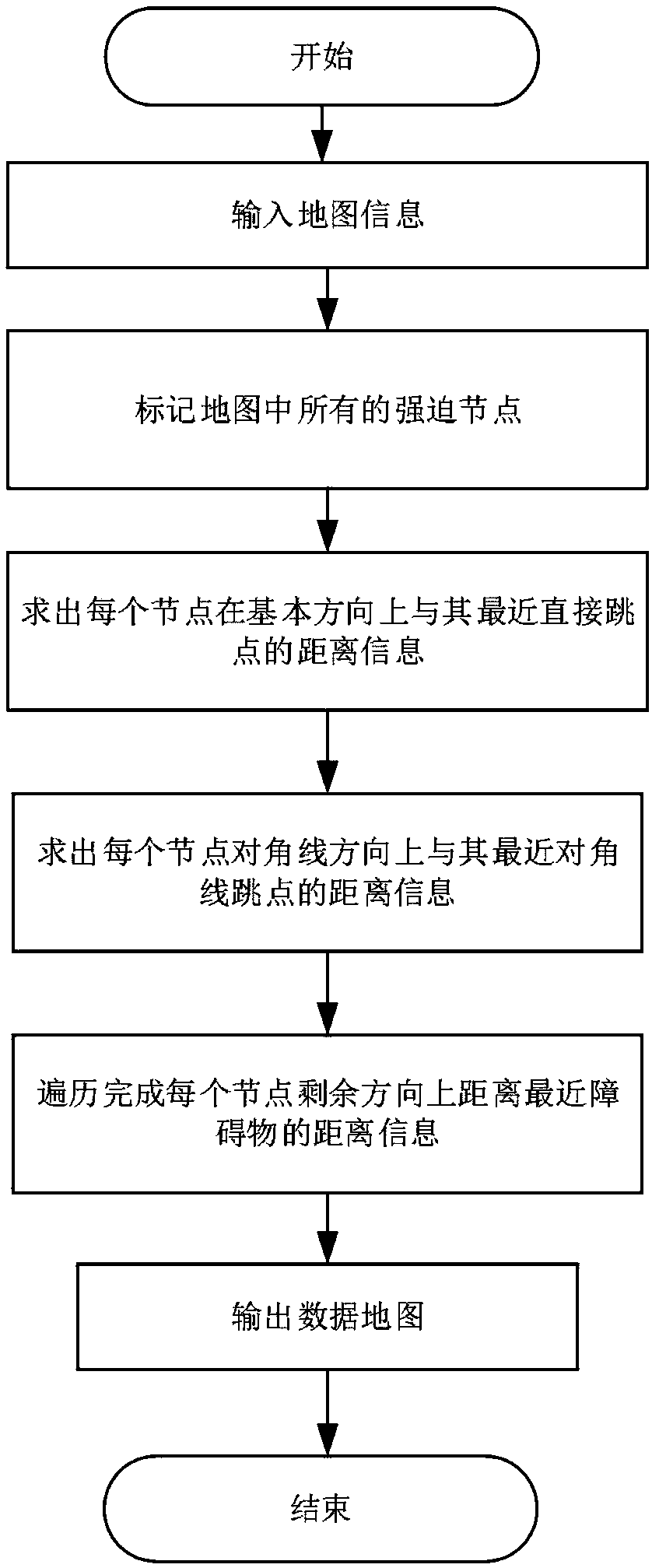
[0062] The multi-agent conflict avoidance path planning method based on JPS (Jump point search) aims to solve the problems of high time complexity of multi-agent conflict avoidance search algorithm and low efficiency of system planning conflict-free path. The main idea is to use the CBS (Conflict-based Search) search framework and the underlying jump-point search algorithm to quickly and accurately plan conflict-free paths for multiple agents based on the input map scene information, and finally output the sum of the path times of all agents The smallest optimal path.
[0063] The above-mentioned CBS-based search algorithm is mainly divided into two-layer search algorithms, including the bottom-level search algorithm and the top-level search algorithm. The bottom-level search algorithm refers to the path sequence result of planning a single agent, which can effectively redu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More