

A Pneumatic Supporting Disaster Rescue Robot
A robot and jacking technology, which is applied in the field of disaster relief robots, can solve the problems of low jacking height and inability to place airbags, and achieve the effect of enlarged entrance, small shape and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019]DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
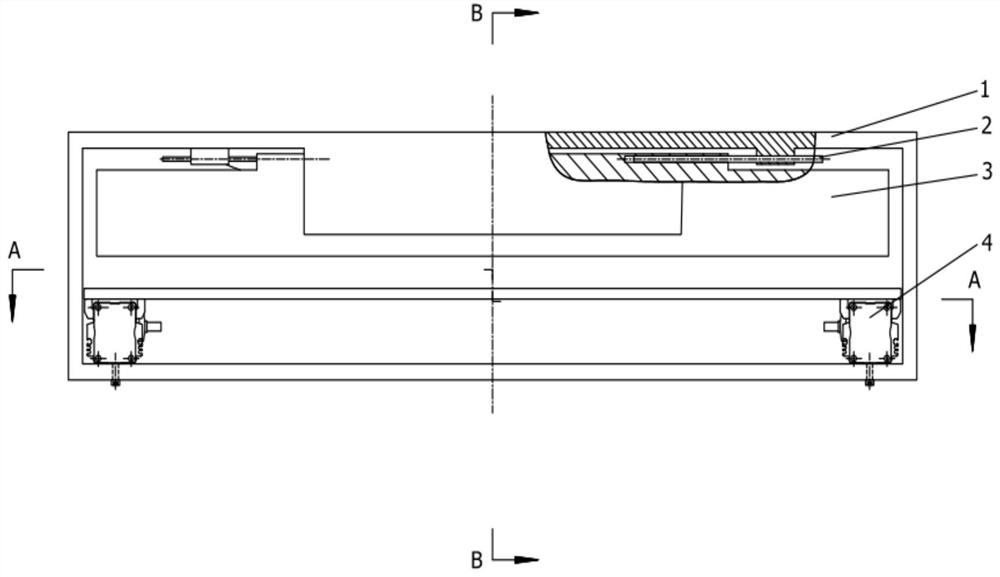
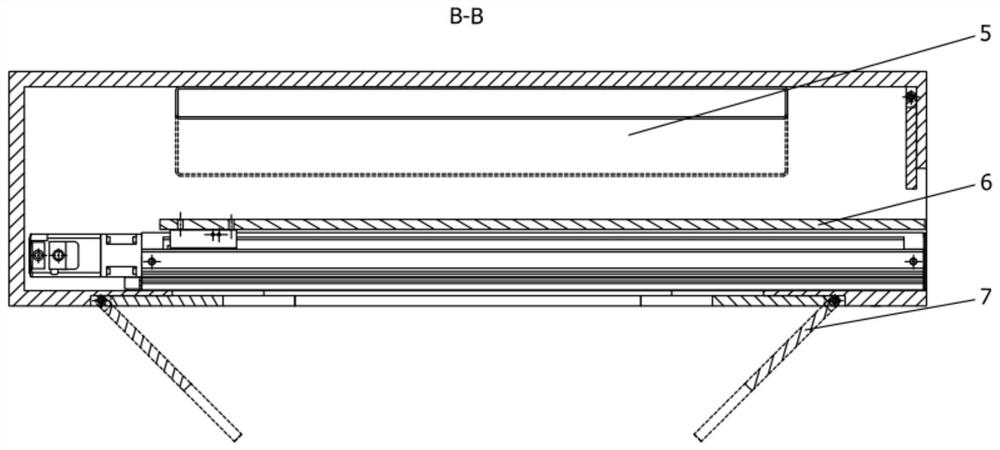
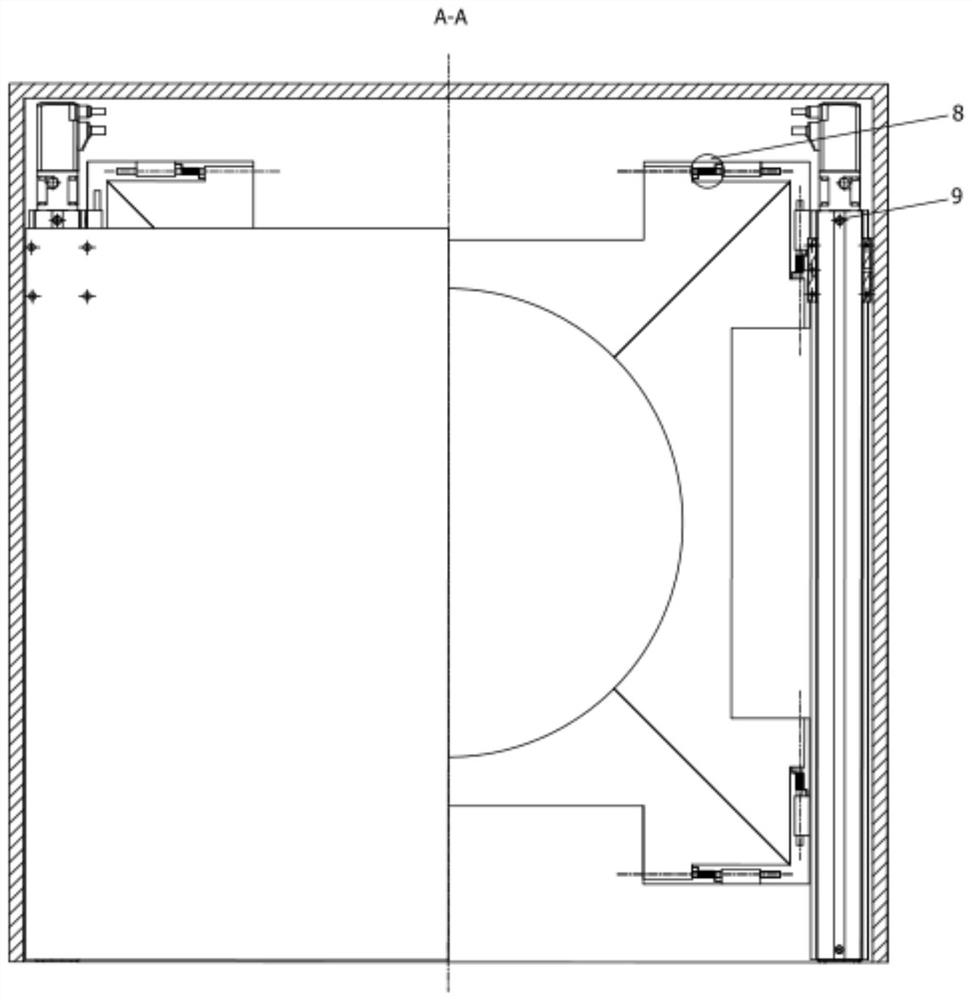
[0020]Pneumatic top-up disaster relief robots can be divided into two parts of the transfer unit and the top rising unit according to the function classification. The transfer unit can be divided into electric slide 4 and slide 6 according to the structure; the tapered unit can be divided into body 1, the pin shaft 2, the side panel 3, the columnar airbag 5, and flip the bottom plate 7. The main body 1 is a main body portion of the search and rescue, the shape is a long square cavity, and the upper portion is used to withstand the weight; the internal cavity mounts the electric slide station 4, the columnar airbag 5, placed the slide 6, the top of the balloon 10; The bottom is provided with a hollow circle, used to pass through the apex, a top having an opening, and is provided by the top-rising air bag 10, and the opening inside is hinged by the pin shaft 2 side panel 3. .
[0021]Transfer processFigure 5 As shown, the pneumatic t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More