

A slider-type telescopic claw floor climbing machine and a building climbing method thereof
A telescopic claw and slider-type technology, which is applied in the field of climbing robots, can solve the problems of difficulty in guaranteeing clamping stability, complex structure of mechanical claws, and high preparation costs, and achieve low equipment cost, simple and effective working methods, and stable work. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
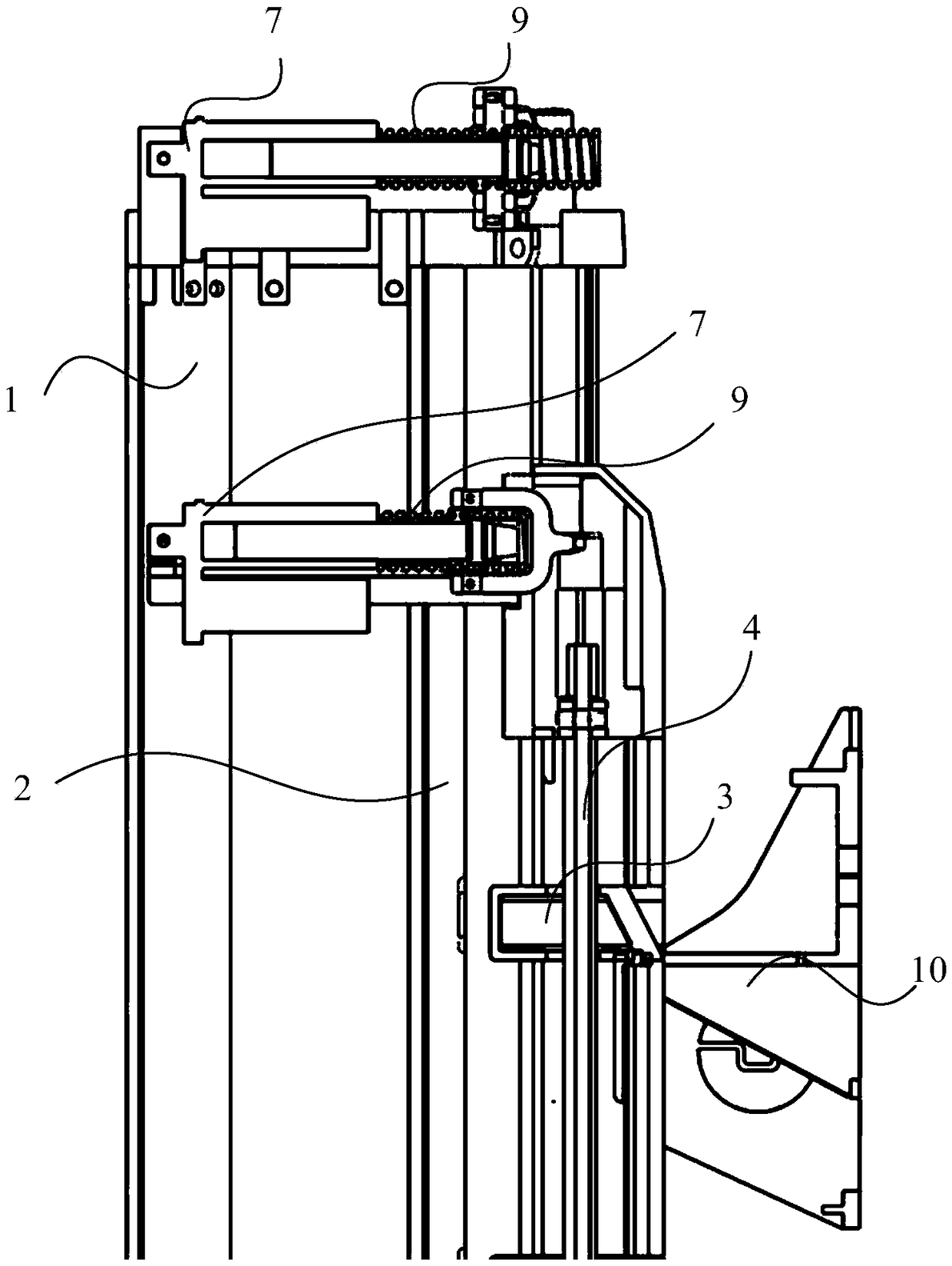
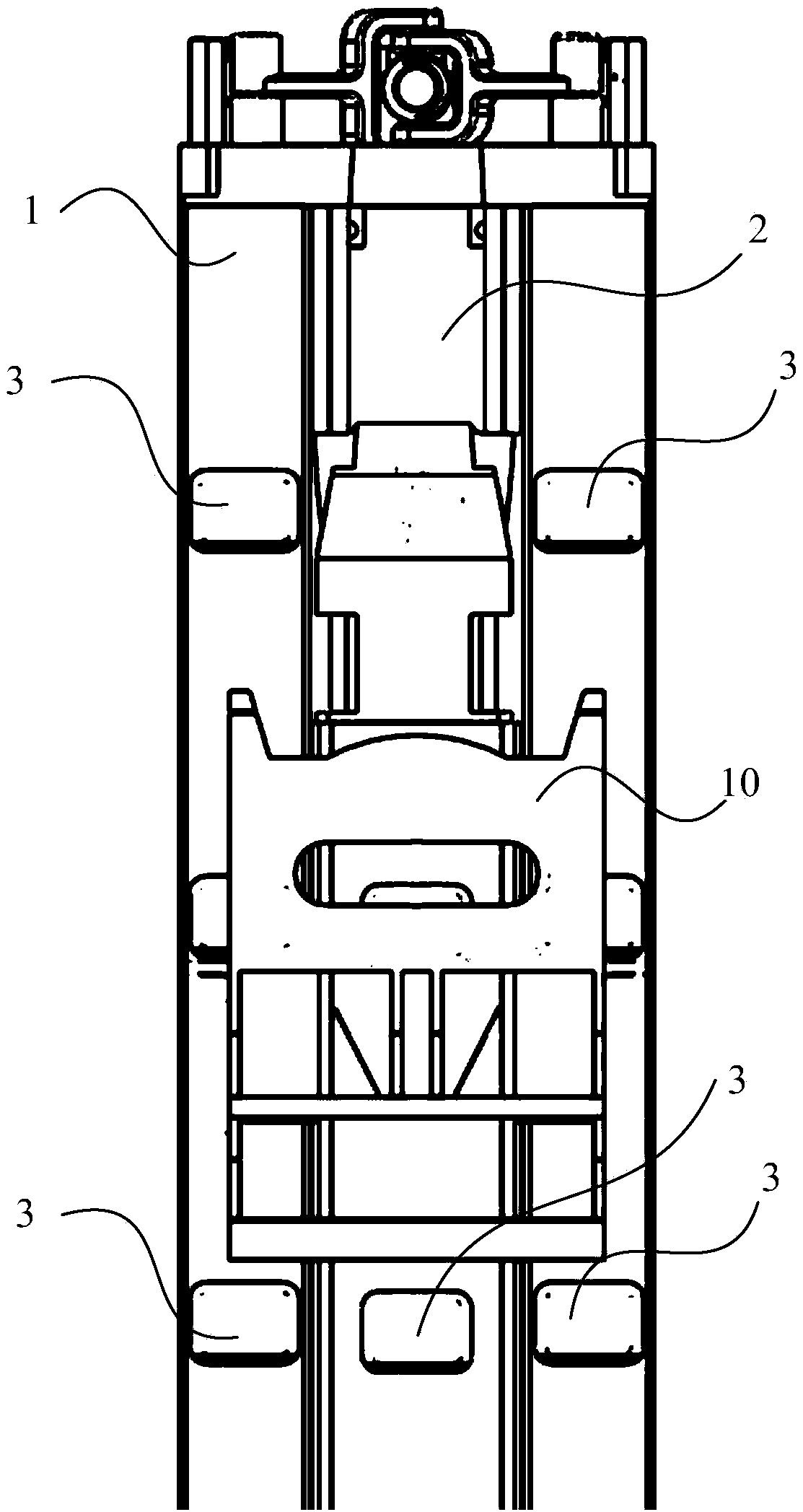
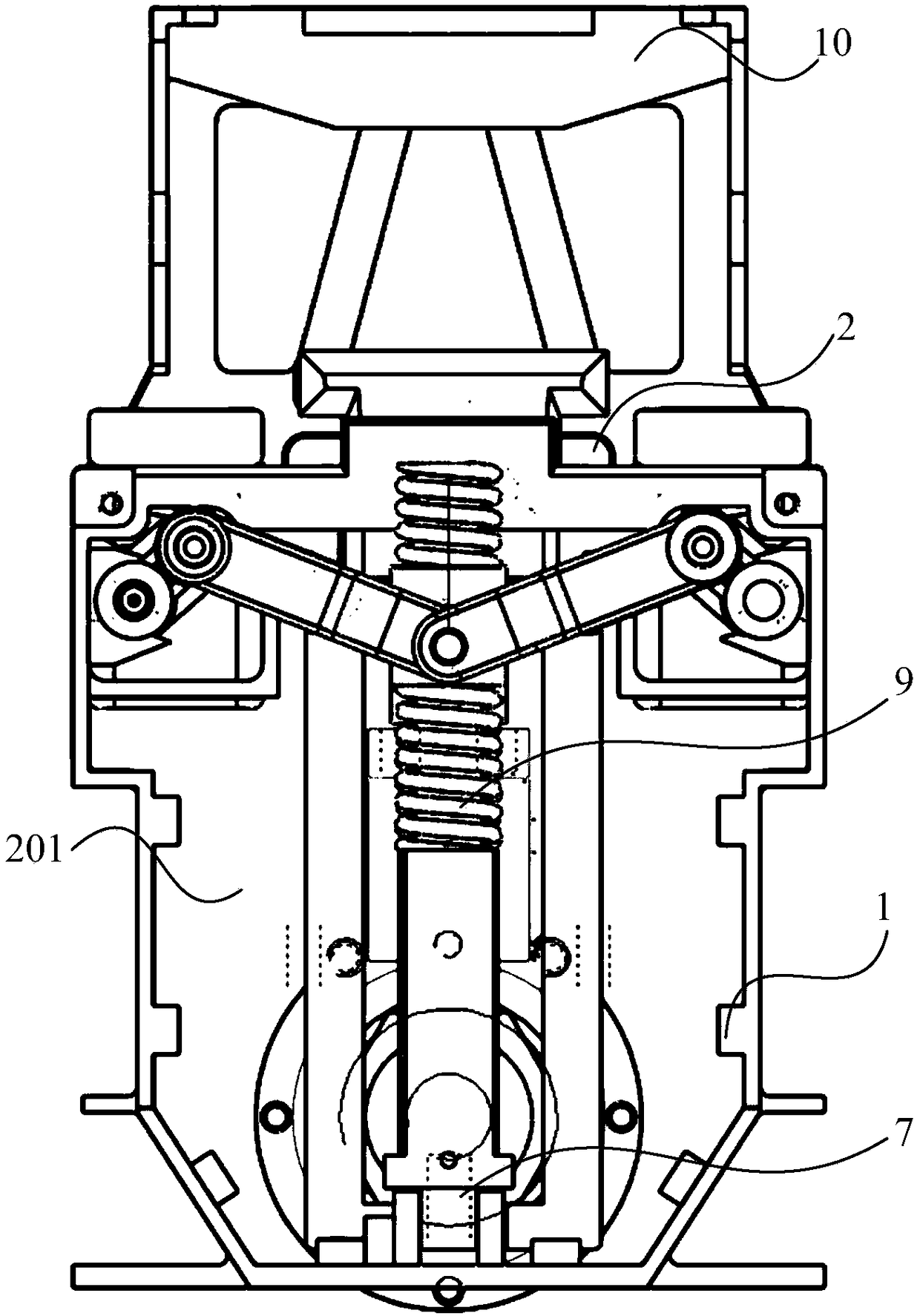
[0040] The embodiment of the present invention provides a slider-type telescopic claw stair climbing machine, which is suitable for automatically climbing and transporting materials on buildings, see figure 1 , the stair climbing machine may include: an inner guide rail 2, an outer guide rail 1 cooperating with the sliding sleeve of the inner guide rail 2, a slider-type telescopic claw mechanism arranged on the inner guide rail 2 and the outer guide rail 1, and driving the inner guide rail 2 and the outer guide rail 2. The climbing power device (not marked in the accompanying drawings) that the guide rail 1 slides relatively. The inner guide rail 2 or the outer guide rail 1 cooperates with 10 sets of slides attached to the wall seat. The slider-type telescopic claw mechanism may include: a slider-type telescopic claw 3, and One end of the sliding block-type telescopic claw 3 stretches out from the reset part 9 of the outer guide rail 1 or the inner guide rail 2 . Wherein, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More