Robot global repositioning method
A robot and repositioning technology, applied in the field of robotics, can solve the problems of limiting the scope of use of robots, lack of robot autonomy, and high cost, and achieve the effects of fast positioning, autonomy, and high autonomy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to further illustrate the features of the present invention, please refer to the following detailed description and accompanying drawings of the present invention. The accompanying drawings are for reference and description only, and are not intended to limit the protection scope of the present invention.
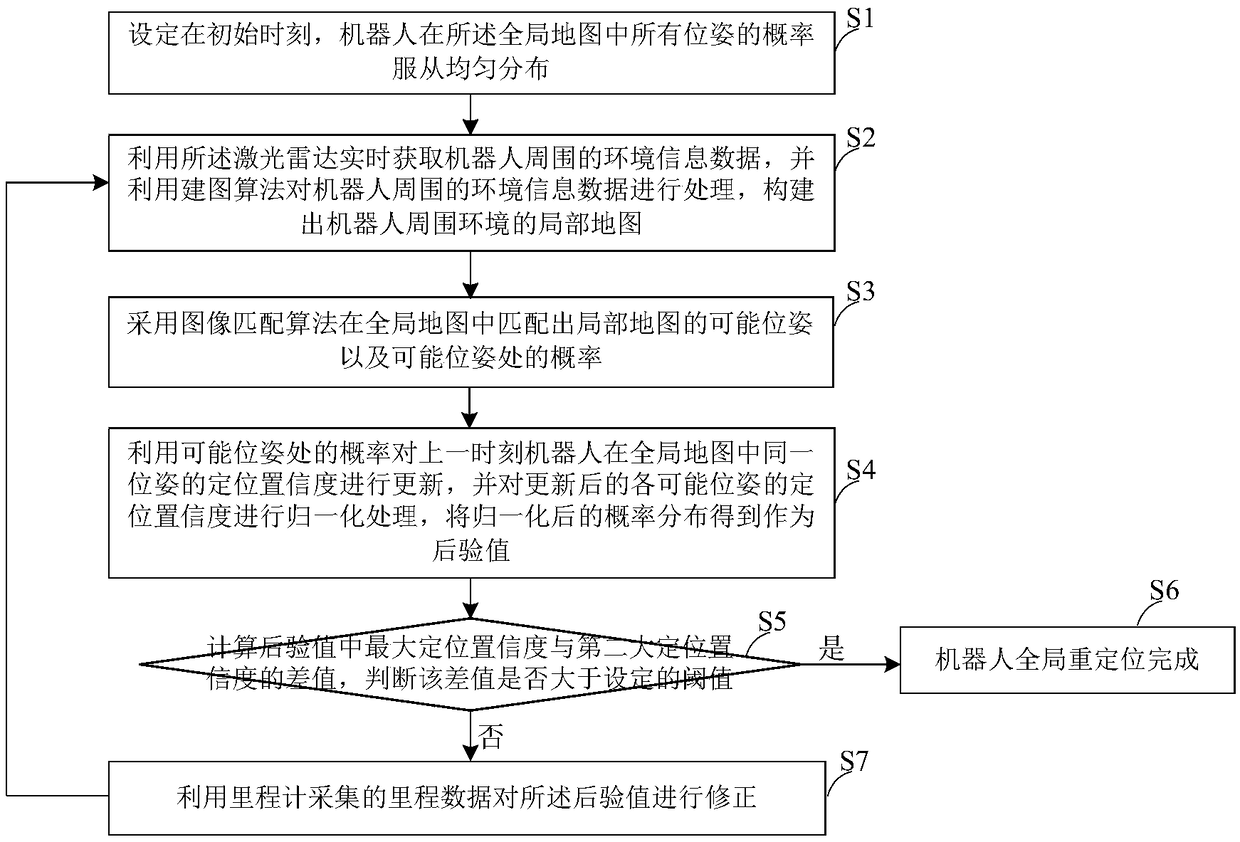
[0025] like figure 1 As shown, this embodiment discloses a global relocation method for a robot. The robot is equipped with a laser radar and an odometer, and the robot pre-stores a global map of its operating area environment, including steps S1 to S7:
[0026] S1. It is set that at the initial moment, the probability of all poses of the robot in the global map obeys a uniform distribution;
[0027] It should be noted that since the robot has global uncertainty at the initial moment, it is assumed that the probability of each pose of the robot in the global environment is equal, so that the probabilities of each pose can be updated later.
[0028] S2. Usi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com