

Target tracking system based on unmanned aerial vehicle cluster
A target tracking and UAV technology, which is applied in the field of UAV cluster target tracking system, to achieve the effect of prolonging observation time, strong cooperation ability and high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
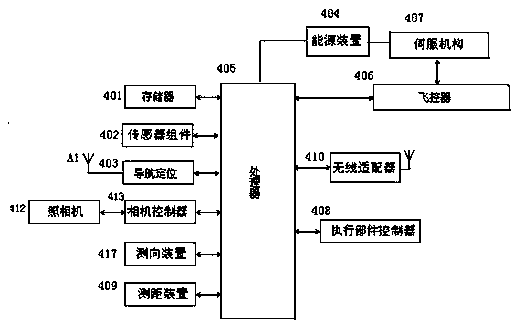
[0042] According to the first embodiment of the present invention, the drone-borne device further includes a sensor component 402 , the sensor component exemplarily includes an altimeter, which is used to acquire height information between the drone and the ground. The sensor components exemplarily include a magnetic heading indicator, a pitot tube, a gyroscope, etc., which are used to measure the heading, speed, etc. of the drone.
[0043] The drone-mounted device also includes a navigation and positioning receiver 403 , which receives the position information and time information of the drone from the navigation and positioning satellite through the antenna A1 , and transmits the data to the processor 405 . The navigation and positioning receiver 403 is, for example, a GPS receiver, a Beidou positioning and timing receiver, and the like. According to one embodiment, the drone-borne device further includes a distance measuring device 409 for measuring the distance between the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More