

High-precision method for hand-eye calibration of fixed camera vision system of SCARA mechanical arm
A vision system and hand-eye calibration technology, applied in the field of robot calibration, can solve the problems of insufficient calibration method accuracy and complicated operation, and achieve the effects of facilitating high-precision alignment, improving calibration accuracy, and improving calibration accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention. Obviously, the described embodiments are only preferred embodiments of the present invention. Based on the embodiments of the present invention, those skilled in the art use other target images, affine transformation models, nonlinear optimization methods, combinations of manipulator rotation and translation, or different preset image positions, etc. All other embodiments belong to this invention scope of invention protection.
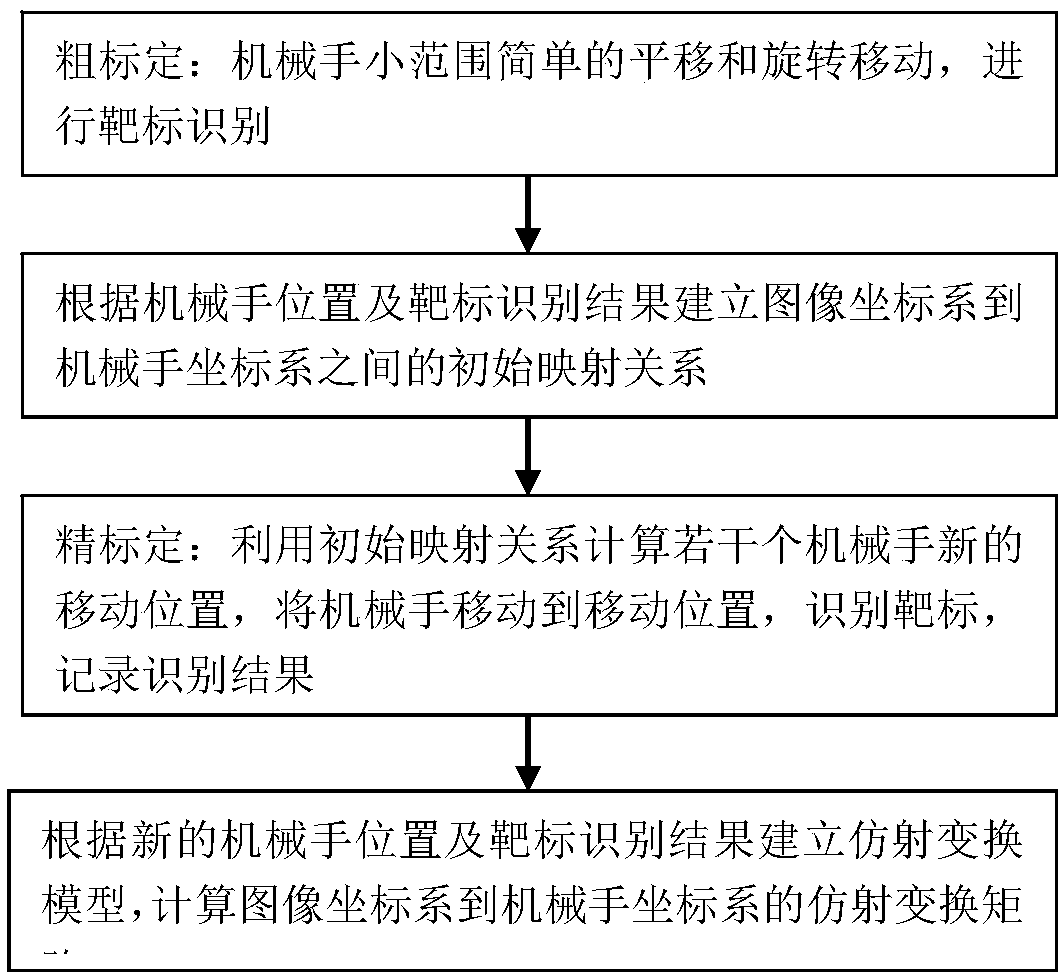
[0048] Such as figure 1 As shown, a high-precision method for hand-eye calibration of a SCARA manipulator with a fixed camera vision system, using a SCARA manipulator and a fixed camera vision system to grasp a workpiece, and perform real-time high-precision image coordinates to coordinate conversion of the manipulator coordinate system during alignment....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More