

Ant colony-clustering algorithm-based self-adaptive dynamic path planning method of robot
A dynamic path, clustering algorithm technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
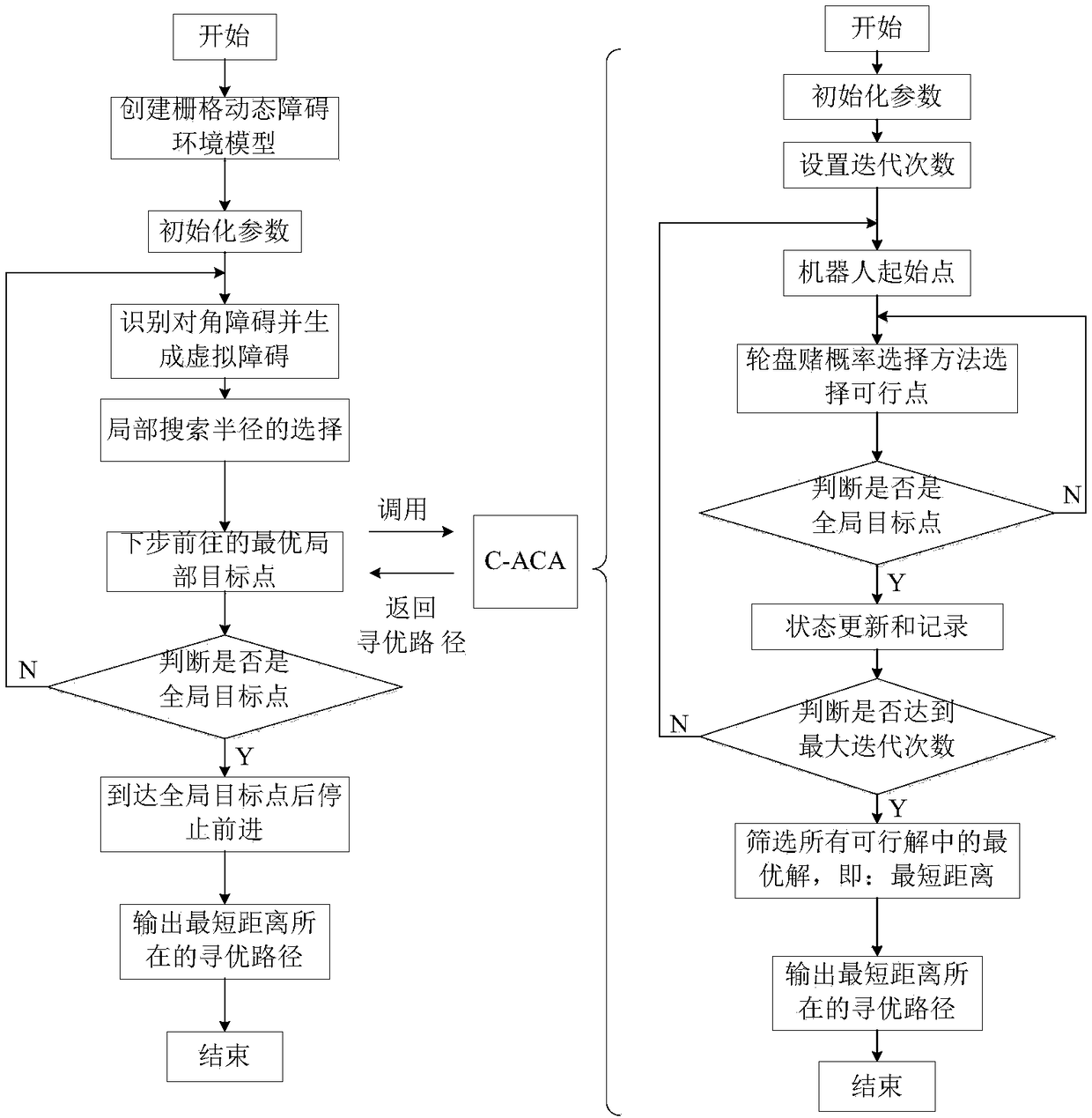
[0065] Embodiment 1: as figure 1 As shown, a robot adaptive dynamic path planning method based on ant colony-clustering algorithm, the specific steps are:
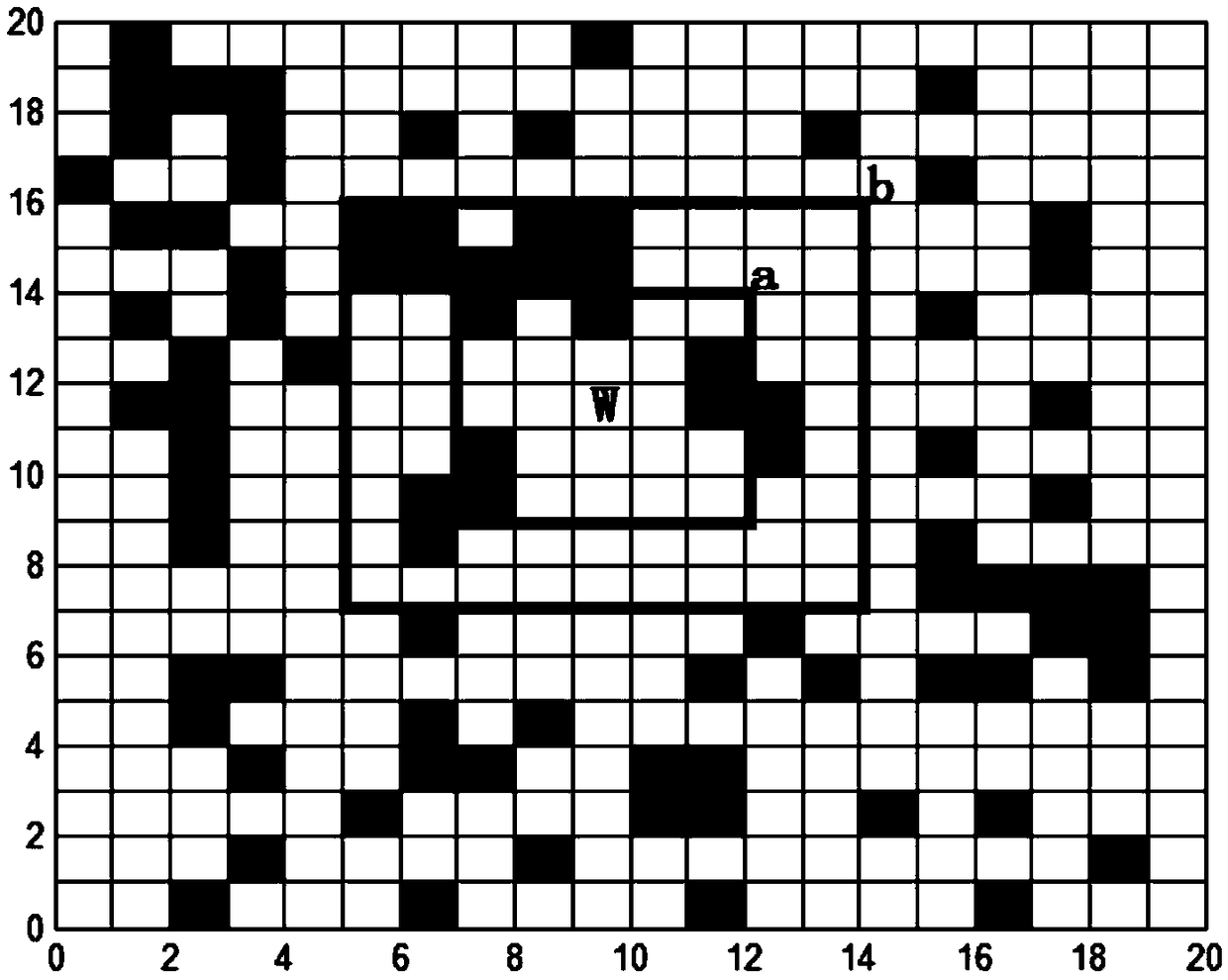
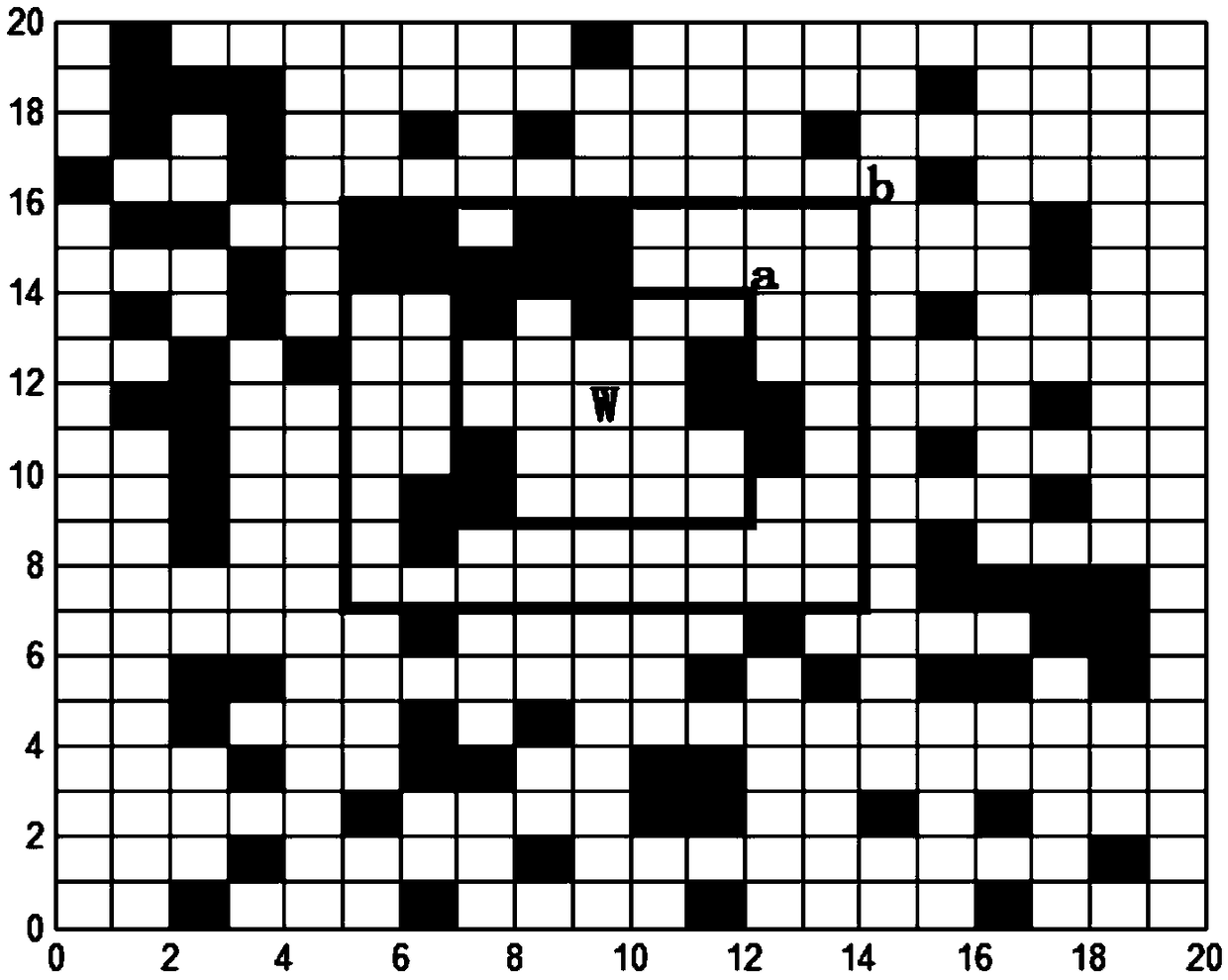
[0066] (1) Using the grid method to model the working environment of the robot: the movement area of the mobile robot in the two-dimensional plane is denoted as G, the lower left corner of the movement area G is the coordinate origin, the horizontal axis is the X axis, and the vertical axis is Y The axis establishes a rectangular coordinate system. Suppose there are several obstacle grids in the motion area G. The obstacle grids are represented by black grids, and the free grids are represented by white grids. The grids are coded by serial number representation. The grid is marked as 0, the obstacle grid is marked as 1, the side length of each grid is marked as a, the maximum grid value in the abscissa and ordinate is MM, and the total number of grids is e=MM·MM. From left to right and from bottom to top, the grids are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More