

Stable and comfortable wheel-crawler combined building-climbing wheelchair
A stair-climbing wheelchair, a composite technology, which is applied to the patient's chair or special transport, vehicle ambulance, medical transport and other directions, can solve the problems of difficult turning, not considering the adjustment of posture and center of gravity, and the acceleration of wheelchair speed, etc. Achieve the effect of reducing mechanical vibration or interference, improving safety and comfort, and climbing stairs smoothly and safely
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] Example 1 A Stable and Comfortable Wheel-Trail Composite Stair Climbing Wheelchair
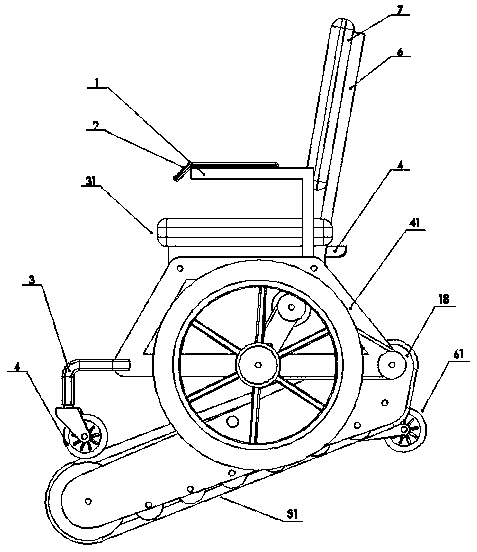
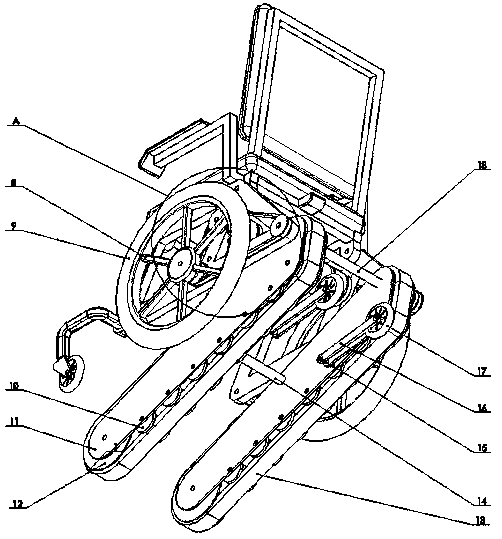
[0043] Such as figure 1 As shown, a stable and comfortable wheel-track compound type wheelchair that can climb stairs includes a wheelchair body 31 and a wheel mechanism 41 that drives the wheelchair body 31 to move. The crawler belt rotating device 18 for adjusting the angle of the crawler belt traveling mechanism 51, the crawler belt driving device for driving the crawler belt traveling mechanism 51, the wheel driving device for driving the wheel mechanism 41, and the control of the crawler belt rotating device 18, the crawler belt driving device and the wheel type A controller 5 for the operation of the driving device. The function of the controller 5 is to receive the signal transmitted by the wireless remote controller, and to send driving signals to driving mechanisms such as the rotating device 18, the crawler driving device and the wheel driving device, so that the wheelchair h...
Embodiment 2
[0052] Embodiment 2 A stable and comfortable wheel-track composite stair-climbing wheelchair that can be remotely controlled
[0053] As mentioned above, the stable and comfortable wheel-track compound stair-climbing wheelchair of Embodiment 1 can interact with the user's mobile phone through the wireless remote control 71 to realize remote control of the wheelchair. In this embodiment, on the basis of Embodiment 1, the controller 5 is set as a multi-functional controller, which not only mainly controls driving power, but also can be equipped with additional special-purpose function controllers (such as mobile phone dial-up controllers, Positioning controller, alarm) can realize different functions. In the special case of detecting a drastic change in the angle, such as when the car body rolls over, the sounder can be used to alarm in time, which has broad application prospects.
[0054] The controller 5 of this embodiment includes a smart main board; the smart main board incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More