

Driverless car travelling right of way planning method based on traffic rules constraint
An unmanned vehicle and right-of-way technology, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve the problem of not considering the constraints of traffic rules and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
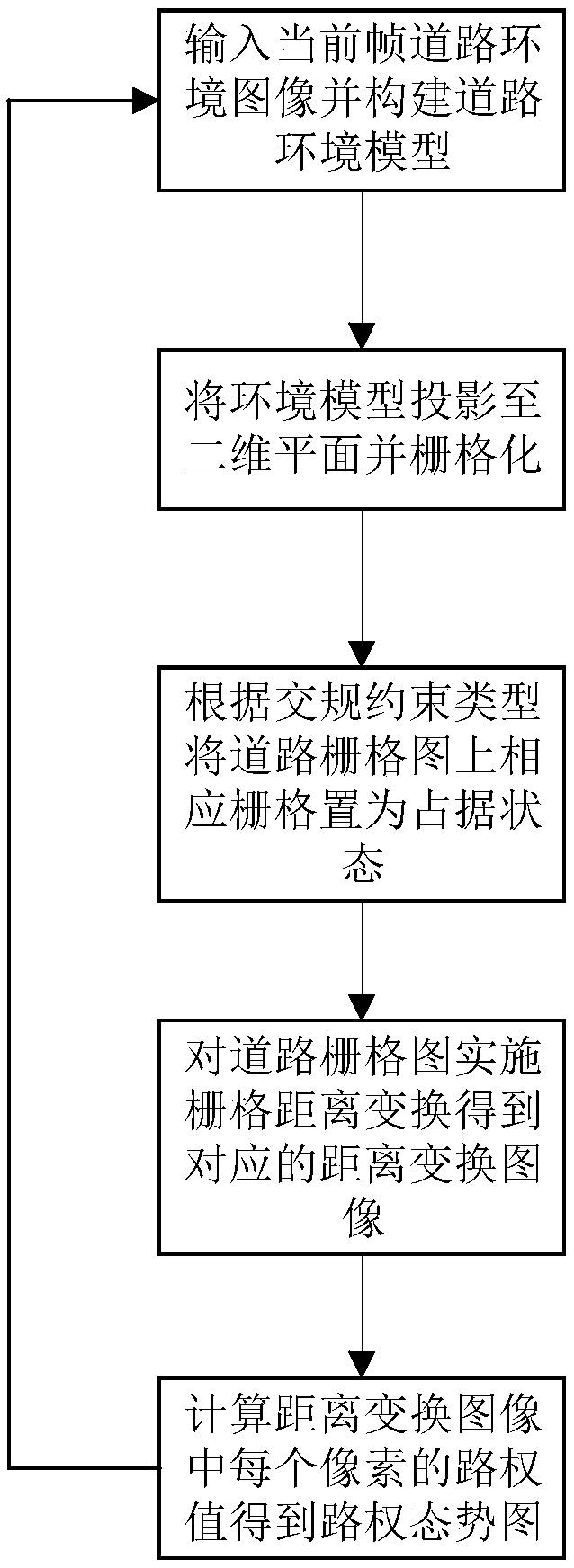
[0027] like figure 1 As shown, a method for planning the right of way for unmanned vehicles based on traffic regulations constraints in this embodiment includes the following steps:
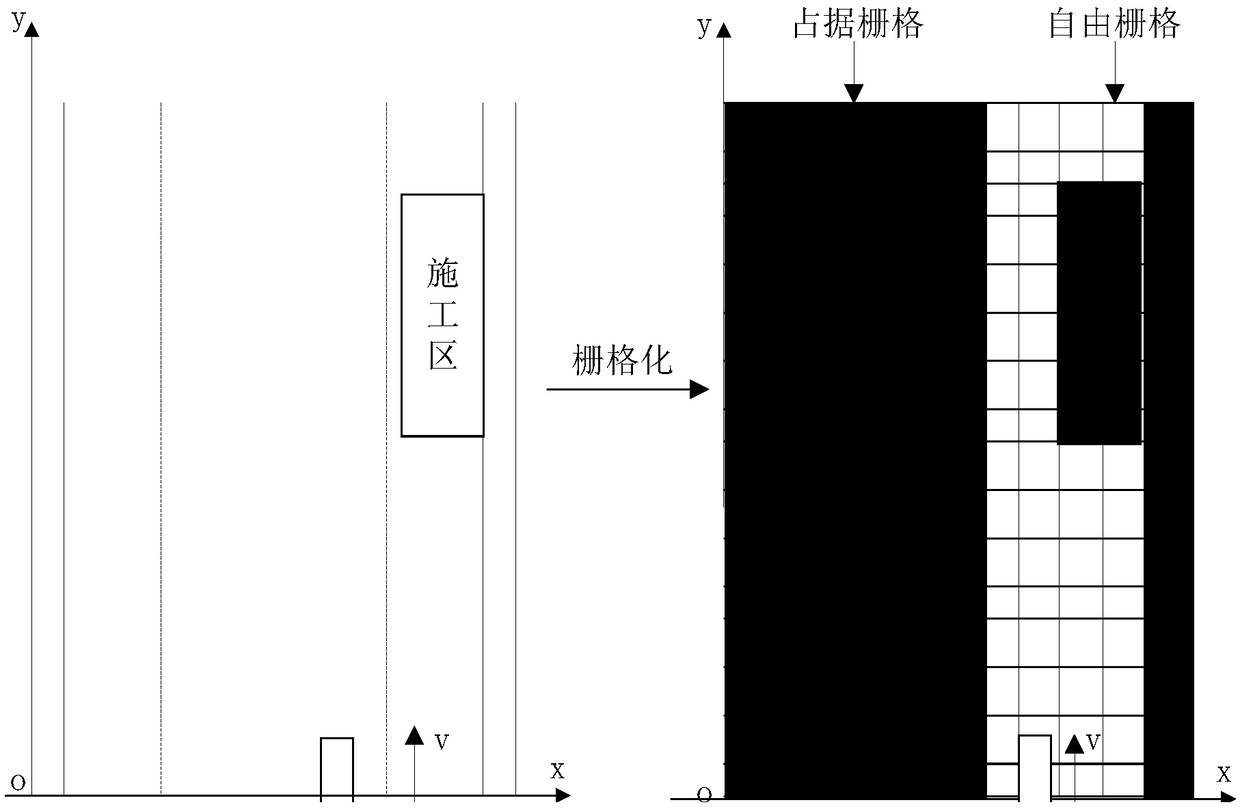
[0028] Step (1), converting the road environment image into a road top view and rasterizing the road top view, the specific steps are as follows:
[0029] For the road environment image collected by the binocular camera, the coordinates of any point in the pixel coordinate system are [u, v] T , then according to the perspective camera model, the coordinates P(X, Y, Z) of the space point P corresponding to the pixel in the world coordinate system can be obtained:
[0030]
[0031] In the formula, K is the internal parameter of the camera, and R, t is the external parameter of the camera.
[0032] Using formula (1), the point cloud data of the road environment can be calculated according to the road environment image, and the top view of the road can be obtained by projecting the point cloud d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More