

Test method and system for IMU (Inertial Measurement Unit) automatic calibration
An automatic calibration and testing method technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of low generalization and intelligence, single function of the inertial navigation automatic test platform, cumbersome process, etc., and achieve the improvement of calibration efficiency and measurement accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principle of the present invention and are not intended to limit the scope of the present invention.
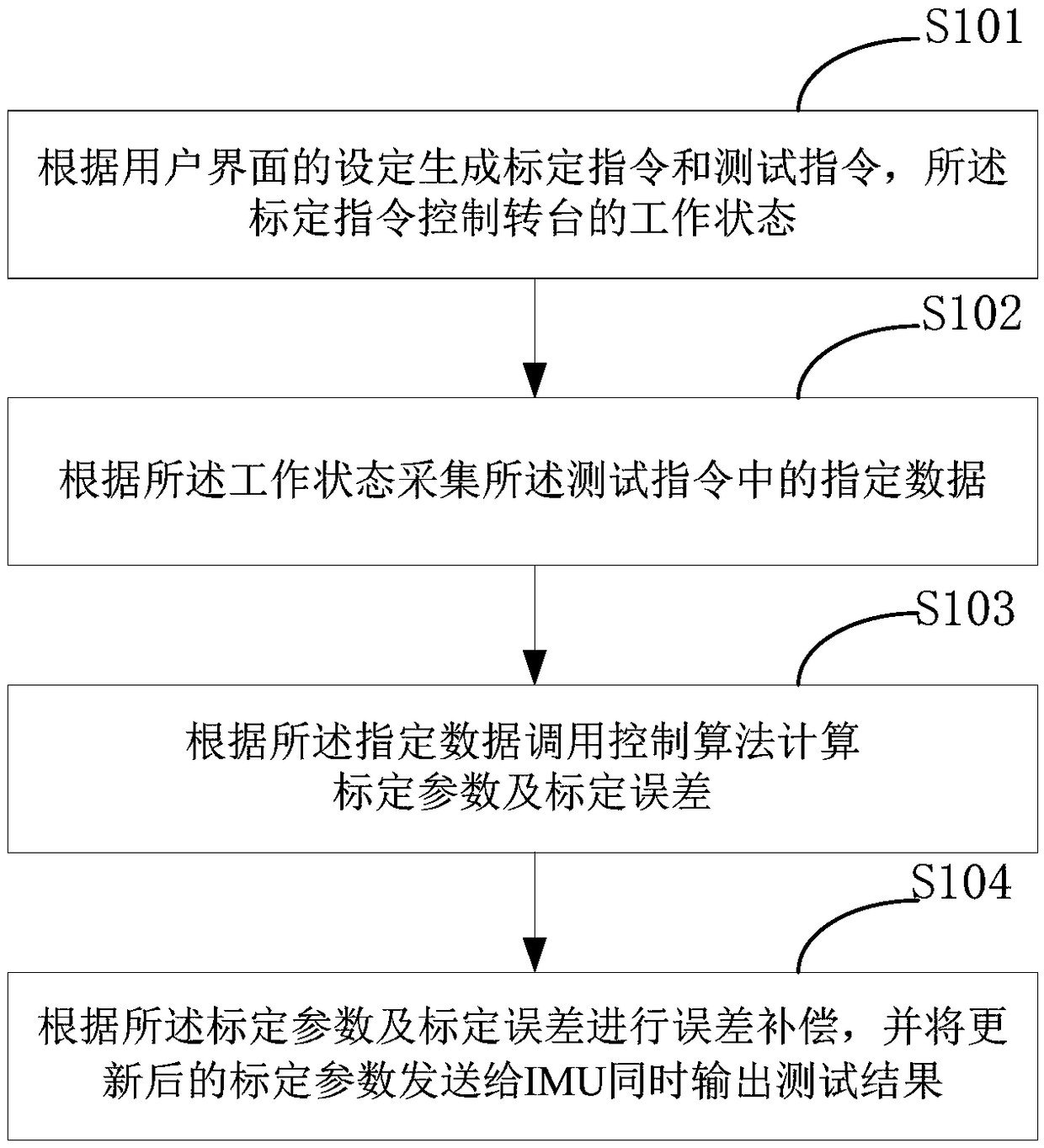
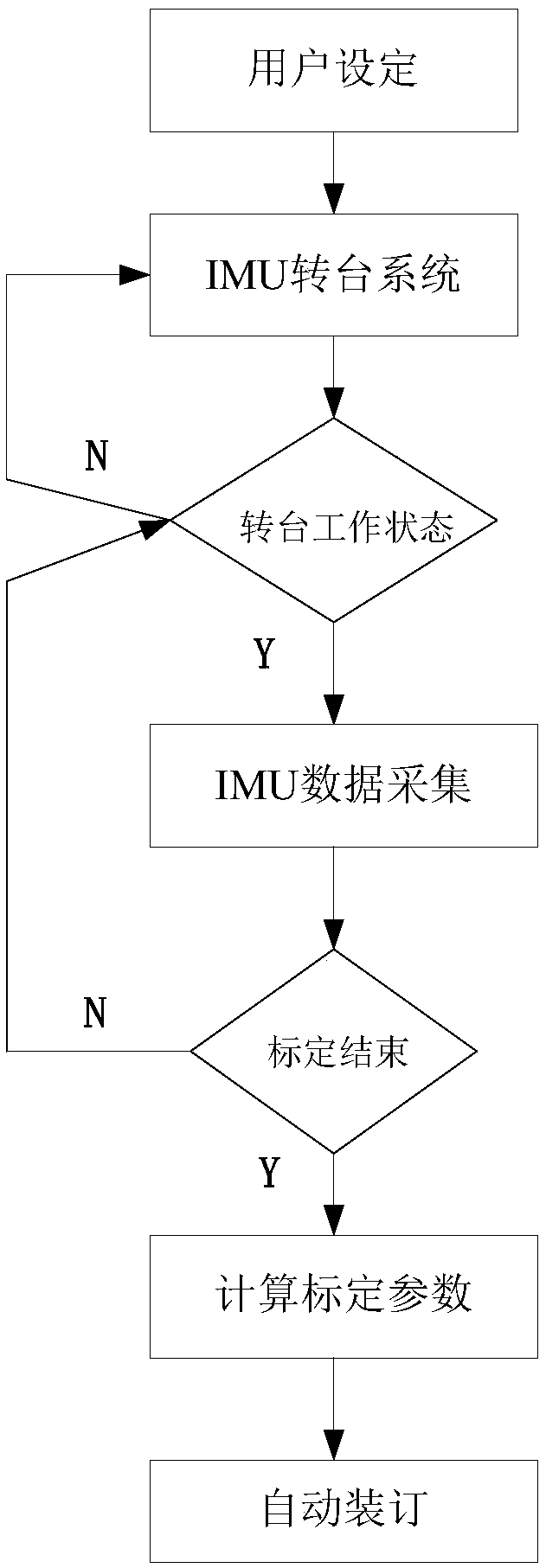
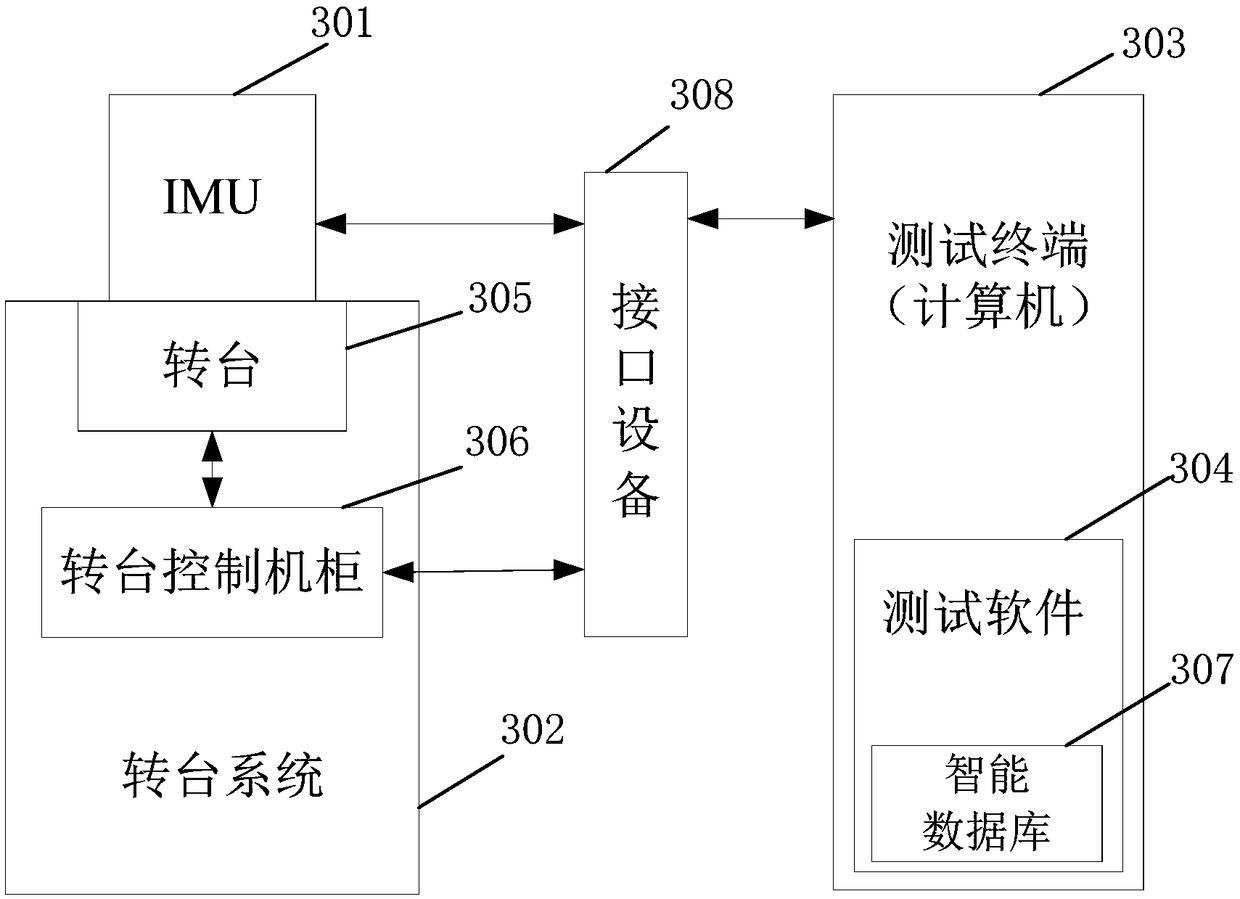
[0024] Aiming at the problems that the current traditional manual calibration and testing methods have low precision, complex process, long period, heavy workload and low efficiency, some inertial navigation automatic test platforms have single functions, and the degree of generalization and intelligence is not high, the first embodiment of the present invention A test method for automatic calibration of IMU, which realizes automatic data collection and processing, automatic control of the turntable and automatic realization of the entire calibration process, using C language, MATLAB or LabVIEW...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More