

Resource scheduling method for mixed formation of manned aerial vehicles and unmanned aerial vehicles
A resource scheduling and multi-UAV technology, applied in the field of UAV formation, can solve the problems of not realizing the advantages of distributed decision-making parallelism, limited practicability, and not realizing the coordination and cooperation of distributed units
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
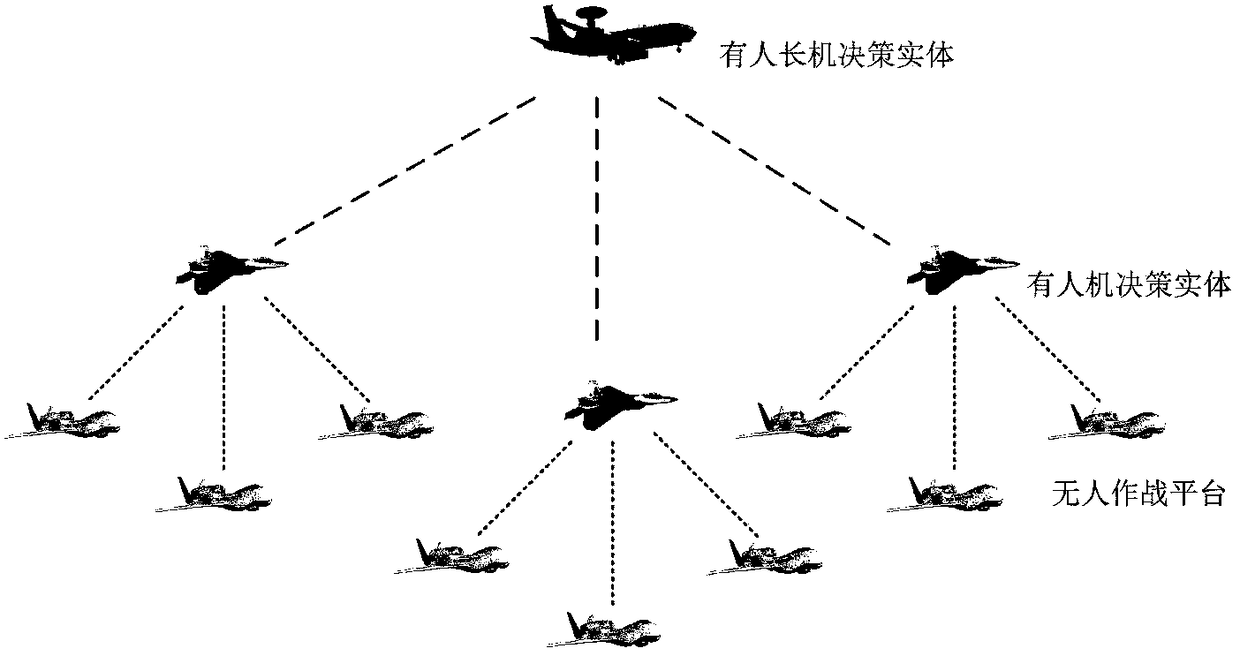
[0080] The command and control relationship between multi-manned aircraft and multi-UAV mixed formation is as follows: figure 1 As shown, the distributed resource scheduling of multi-manned and multi-UAV mixed formation is mainly divided into two parts, one is the matching optimization of its own UAV resources and tasks within a single manned-machine decision-making entity; the other is the manned-machine decision-making entity. When the decision-making entity itself cannot handle certain tasks, the lead decision-making entity of the manned aircraft coordinates and utilizes the resources of other manned-machine decision-making entities to process the task.
[0081] The core of the method of the present invention is: according to the tasks to be pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More