

A control handover method for unmanned aerial vehicles based on the joint architecture of unmanned systems
A technology of control rights and unmanned aerial vehicles, applied in control/regulation systems, non-electric variable control, three-dimensional position/course control, etc., can solve problems such as direct execution of coordinated tasks, achieve important military benefits and promote application prospects , Improve reliability and ensure mission safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The specific implementation manner of the present invention will be described in detail in conjunction with the summary of the invention and the accompanying drawings.
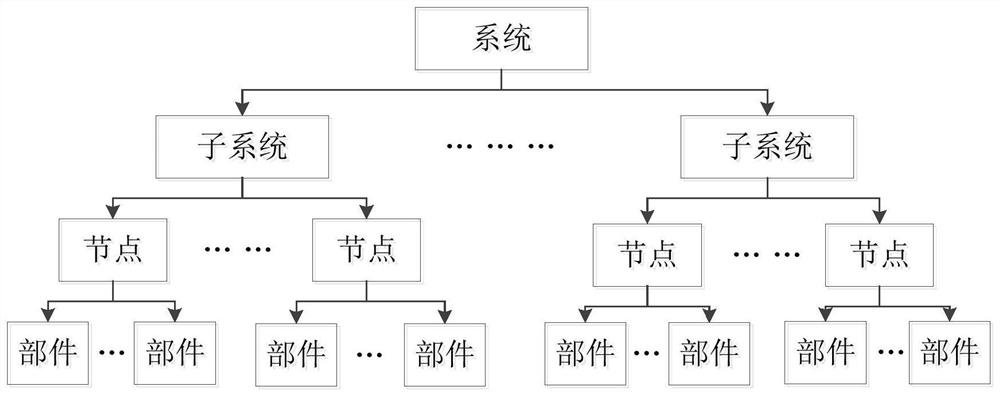
[0037] The general architecture of unmanned systems defined by the Joint Architecture for Unmanned Systems (JAUS) adopts a hierarchical organization method and is divided into system layer, subsystem layer, node layer, and component / instance layer from top to bottom. and the service layer. A "system" is a collection of interoperable "subsystems," typically a physical entity within a system, such as an unmanned vehicle or an operator control unit. Subsystems are broken down into "nodes," which provide a complete set of processing functions, such as a computer or a motion controller. A node manages one or more "components", which generally exist in the node in the form of an application program, while a component consists of a set of "services". JAUS Topology Diagram Institute figure 1 shown.
[0038]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More