

Vibration suppression method of flexible multi-joint robot and vibration control system of flexible multi-joint robot
A multi-joint robot and vibration suppression technology, applied in the field of robotics, can solve problems such as vibration, avoid negative effects, avoid joint life shortening, and improve trajectory tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
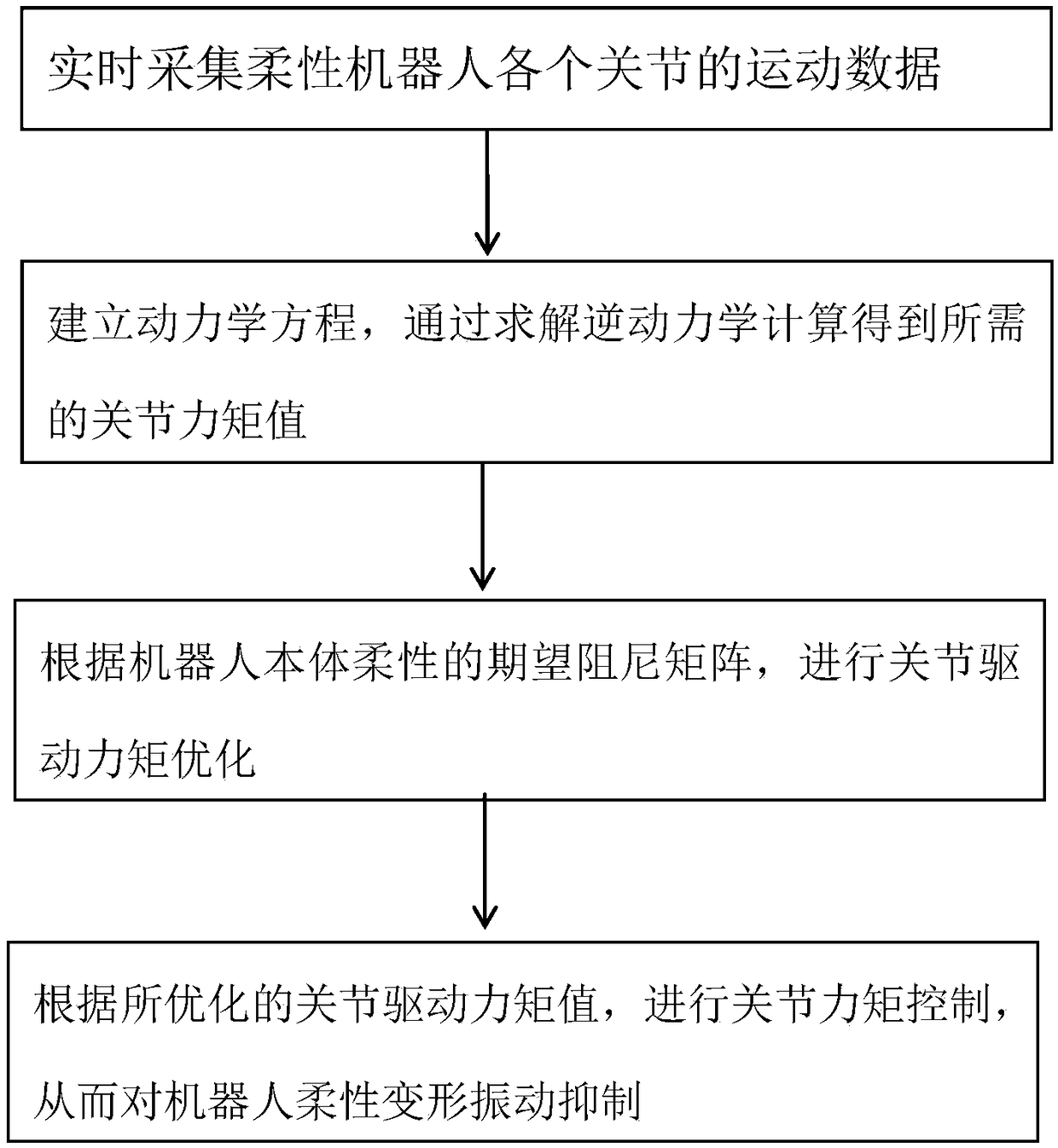
[0054] The purpose of the present invention is to propose a method for suppressing the vibration of a flexible multi-joint robot, which remodels the robot dynamically by means of torque vibration suppression and joint torque optimization, and solves the problem of flexibility by compensating for the flexible deformation of the robot and adjusting the motion posture of the robot. Body vibration problem of multi-joint robot.
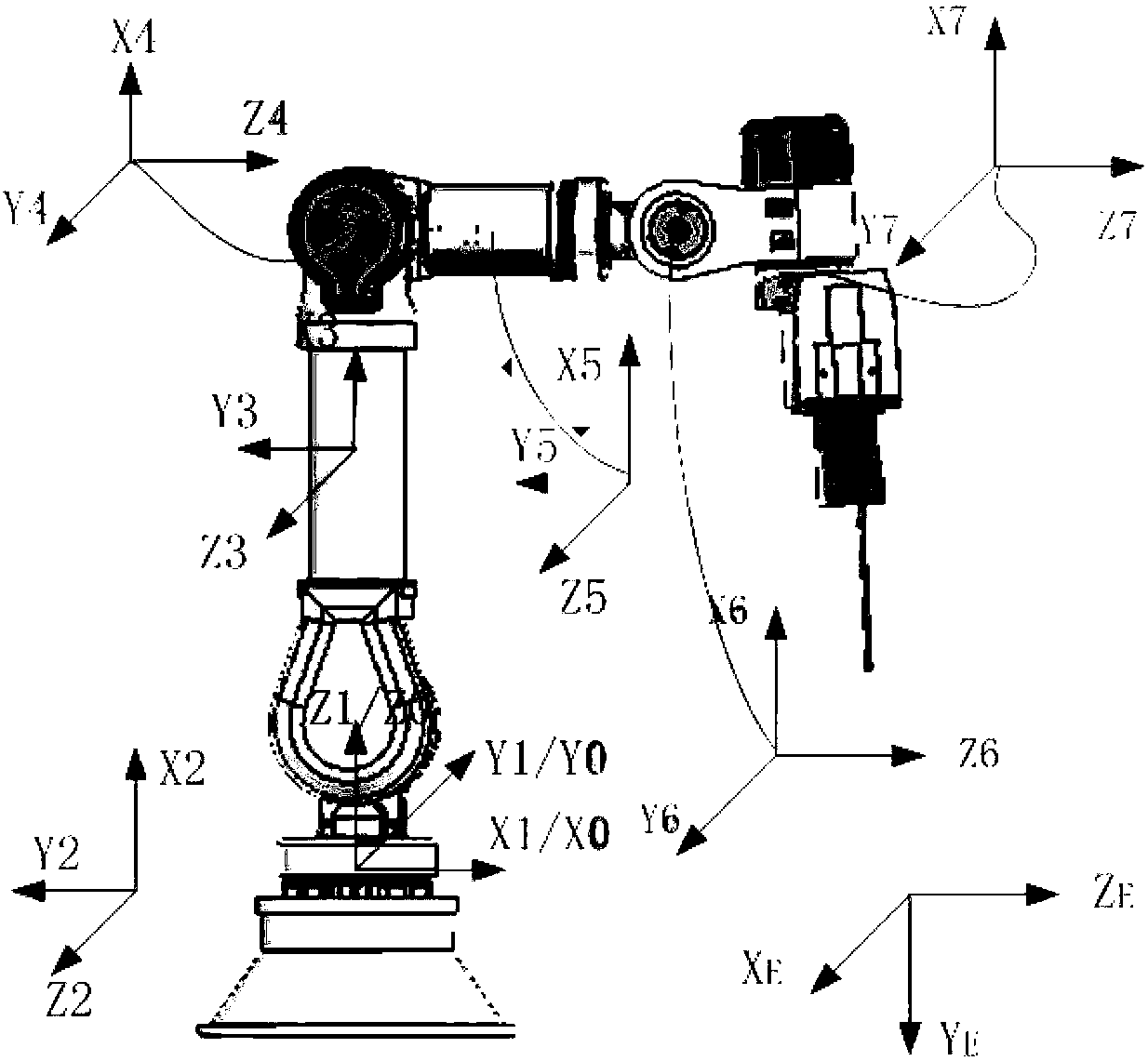
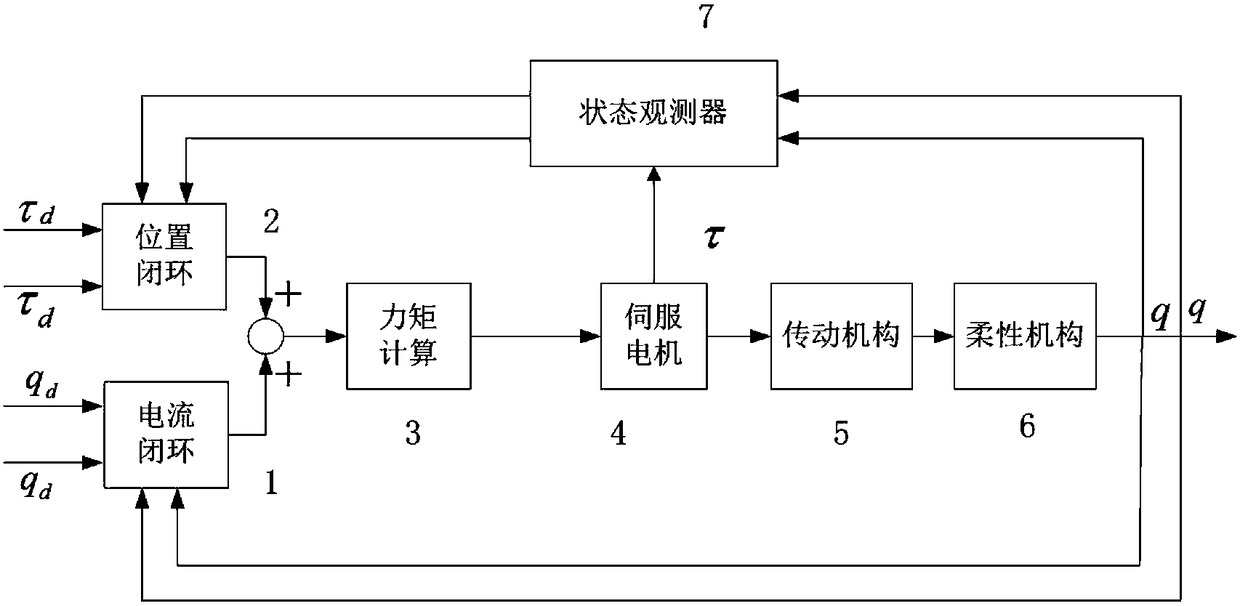
[0055] first reference figure 1 with figure 2 , figure 1 It is a schematic diagram of the joint coordinate system of the flexible robot of the present inventio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More