Unmanned aerial vehicle autonomous positioning method based on visual SLAM (Simultaneous Localization and Mapping)
A self-positioning and unmanned aerial vehicle technology, applied in the field of image processing and computer vision, can solve the problems of increased difficulty and achieve the effects of improved stability and reliability, good scalability, and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Function and characteristics of the present invention are as follows:
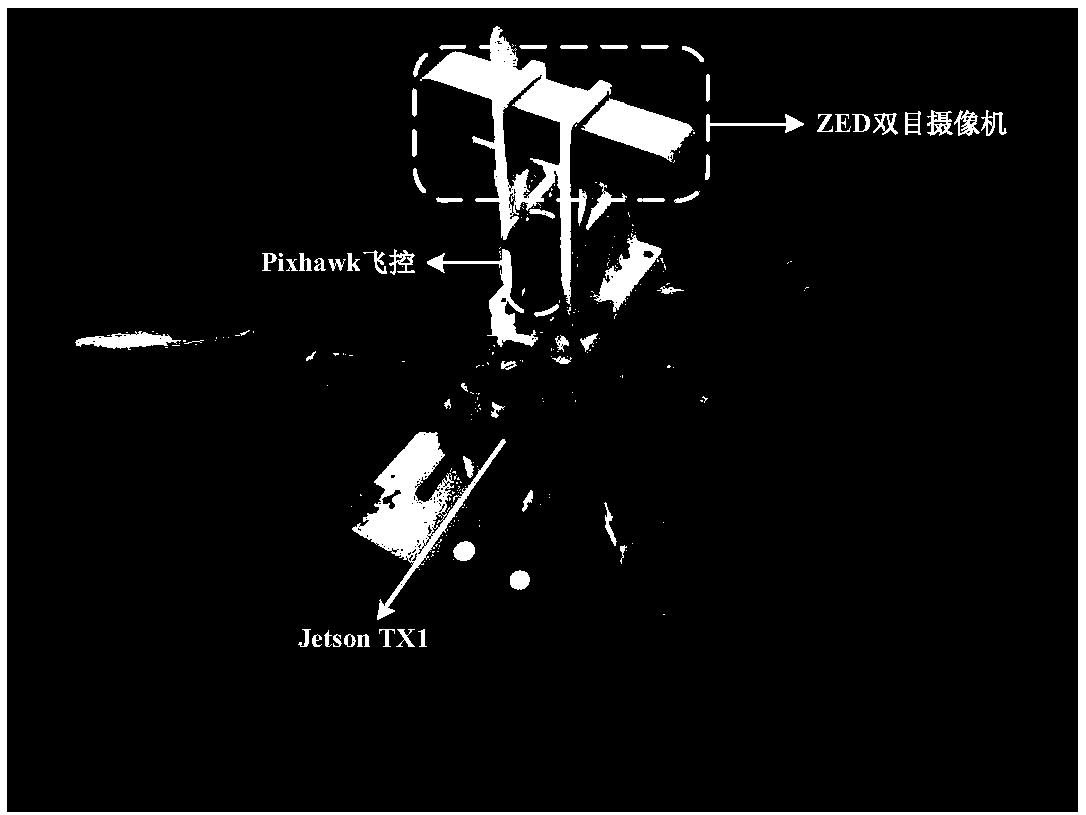
[0037] (1) The present invention has a binocular camera for collecting images in front of the drone. With an imu, used to read acceleration and angular velocity information;
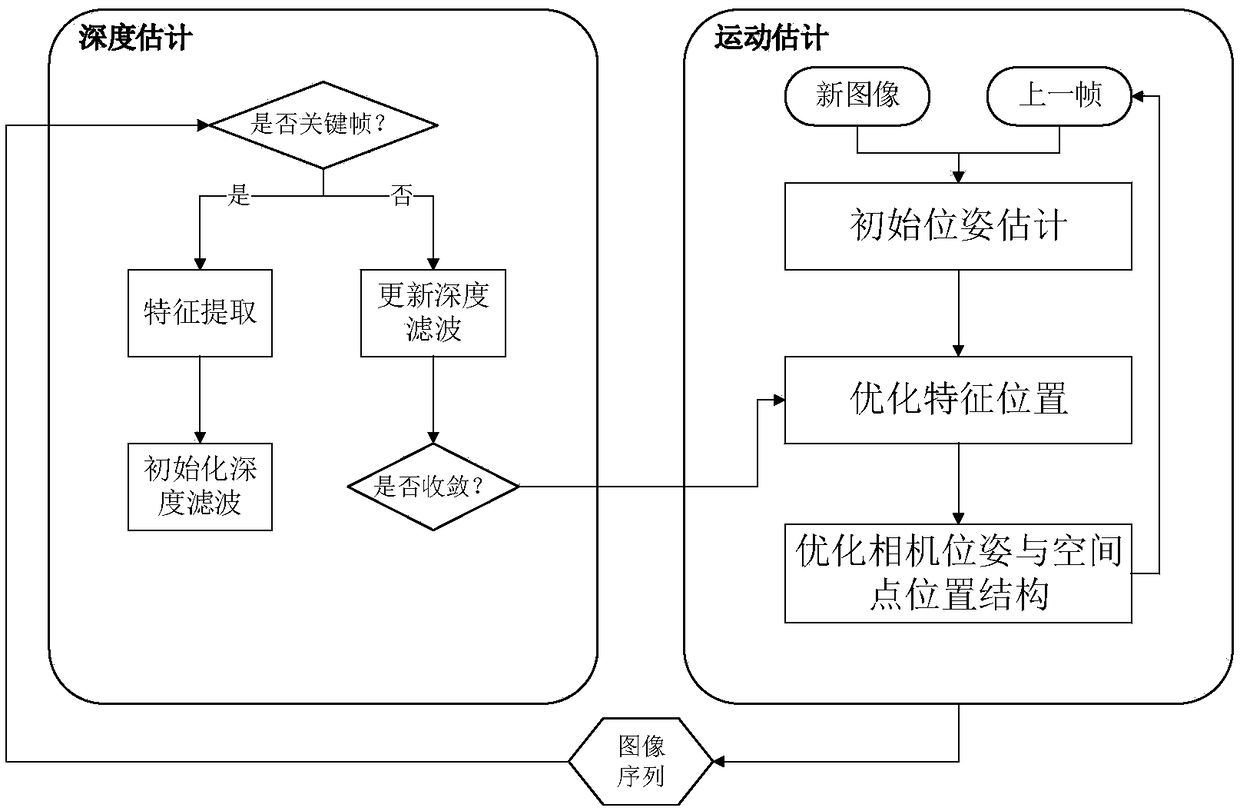
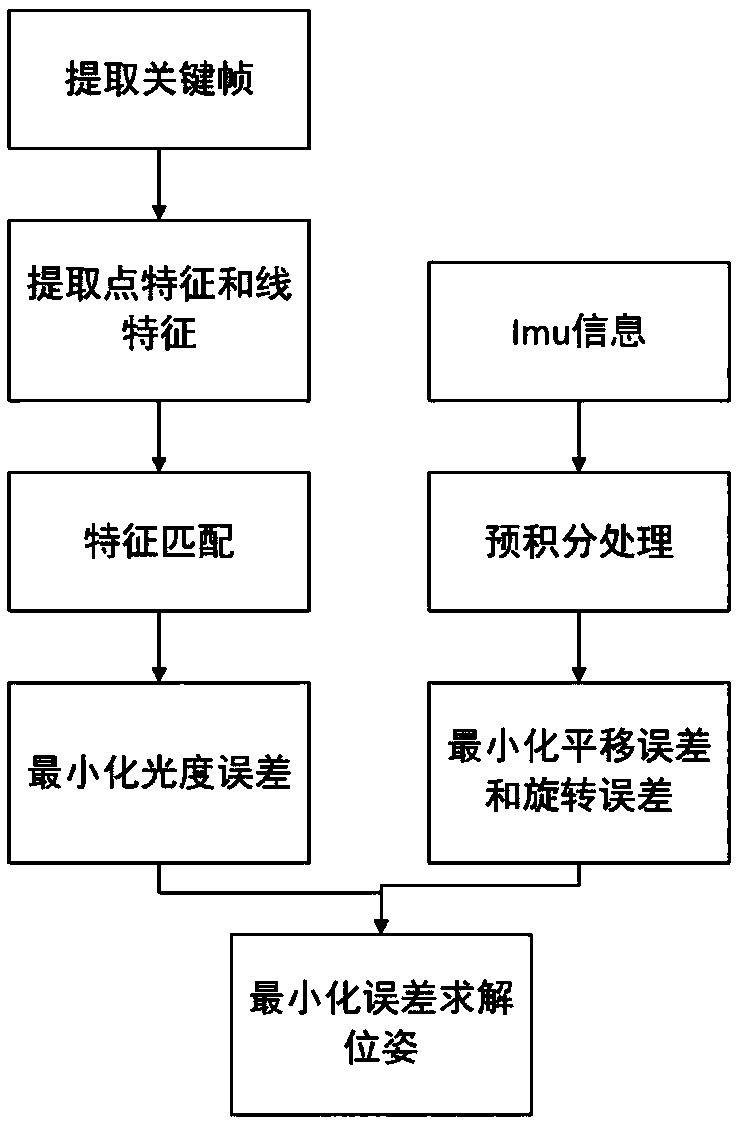
[0038] (2) The present invention processes the images collected by the camera through computer vision, visual SLAM and other technologies, screens out key frames through a certain mechanism, and performs feature matching after feature extraction to initially obtain the pose of the drone . Then process the imu information, fuse the two, and finally get the precise position information of the drone through a series of optimizations.
[0039] (3) The method of combining the direct method and the feature point method is adopted, which combines the advantages of the feature point and the direct method, and greatly improves the efficiency.
[0040] (4) When extracting features, the positioning method in the present invention divi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More