

Fuzzy neural network-based intelligent inspection obstacle prevention method of sewage processing plant
A fuzzy neural network and sewage treatment plant technology, applied in the field of intelligent robots, can solve problems such as incompetence in inspection work, and achieve good obstacle avoidance, timely obstacle avoidance, and strong adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention obtains an intelligent inspection and obstacle avoidance method for a sewage treatment plant based on a fuzzy neural network. Through the intelligent inspection and obstacle avoidance method based on a fuzzy neural network, the inspection robot of a sewage treatment plant is controlled for obstacle avoidance, and the inspection robot avoids obstacles. Intelligent control of obstacles to improve the operation safety and stability of inspection robots;
[0048] 1. An intelligent inspection and obstacle avoidance method for sewage treatment plants based on fuzzy neural network,
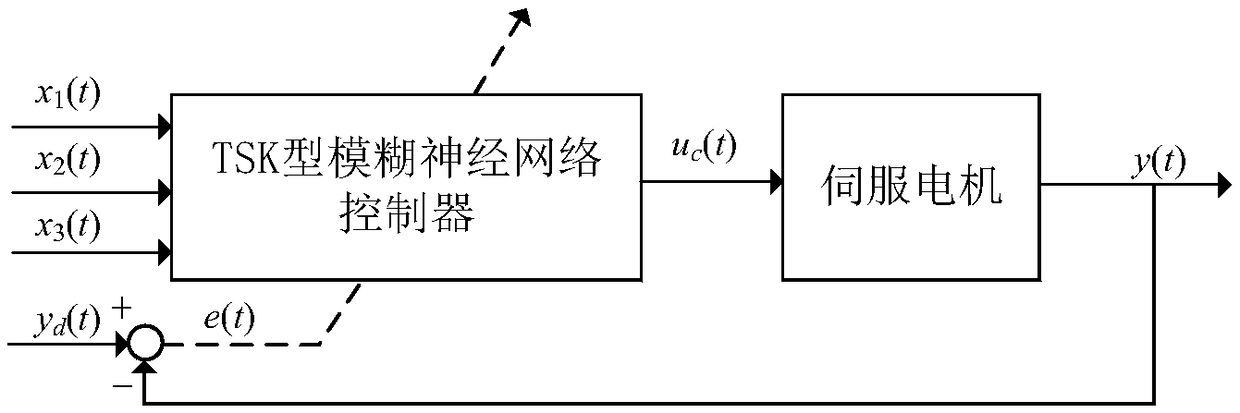
[0049] The movement state of the inspection robot in the sewage treatment plant is controlled. The rotation direction of the servo motor is used as the control quantity, and the movement state of the robot is the controlled quantity. The control structure is as follows: figure 1 ;
[0050] It is characterized in that, comprising the following steps:
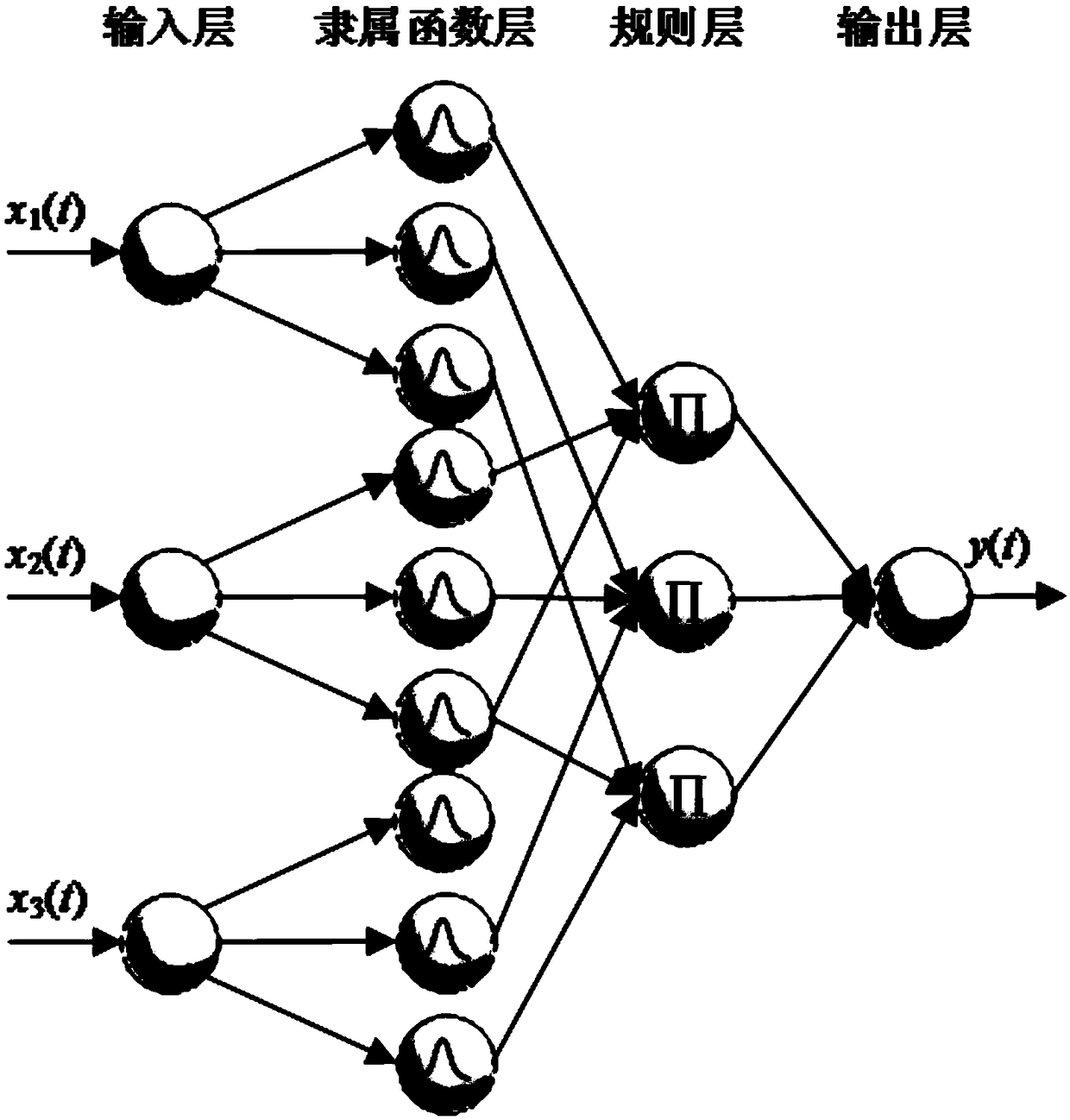
[0051] (1) Design the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More