

Robot-based multi-machine tool automatic feeding and discharging system and method
An automatic loading and unloading and robot technology, applied in metal processing, metal processing equipment, manufacturing tools, etc., can solve the problems of long robot running path, increased production cost, and affecting the quality of processing accuracy, so as to avoid production information errors and travel distance The effect of shortening and improving the utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings of the description.
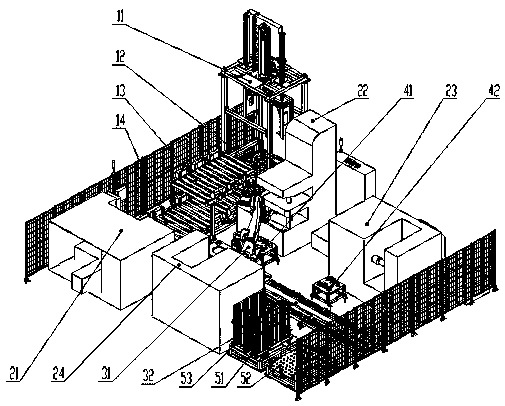
[0034] A multi-machine automatic loading and unloading system and method based on a robot; including a material feeding and conveying unit 1, a machine tool unit 2, a robot and a walking unit 3, a workpiece buffer unit 4 and a material discharging unit 5, wherein:
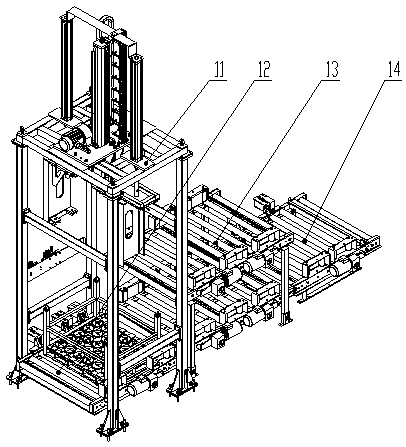
[0035] The feeding and conveying unit 1 includes a truss manipulator 11, a feeding elevator 12, a double-layer conveying line 13 and a return elevator 14, which are used to transfer the products to be processed, and unstack full pallets and stack empty pallets;
[0036] The machine tool unit 2 includes a first machine tool 21, a second machine tool 22, a third machine tool A 23 and a third machine tool B 24, respectively completing the first processing procedure, the second processing procedure and the third processing procedure of workpiece processing;
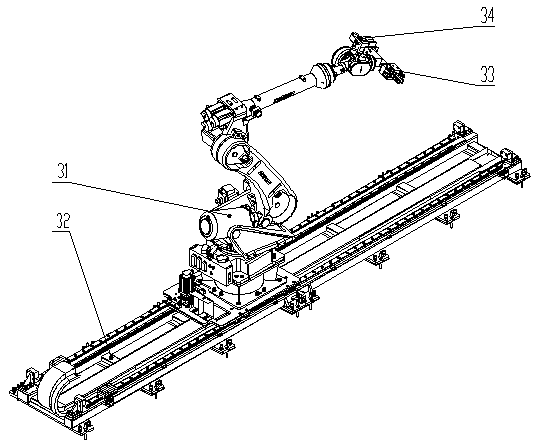
[0037] The robot and walking unit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More