Six-degree-of-freedom robot dynamics parameter identification method and system
A technology of dynamic parameters and identification methods, applied in the field of dynamic parameter identification methods and systems of six-degree-of-freedom robots, can solve problems such as large noise and affecting the accuracy of identification results, and achieve reduced impact, simple process, and reduced calculation volume effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the technical solutions and advantages of the embodiments of the present application clearer, the exemplary embodiments of the present application are described in further detail below with reference to the accompanying drawings. Obviously, the described embodiments are only a part of the embodiments of the present application, and Not all examples are exhaustive. It should be noted that the embodiments in the application and the features in the embodiments can be combined with each other if there is no conflict.
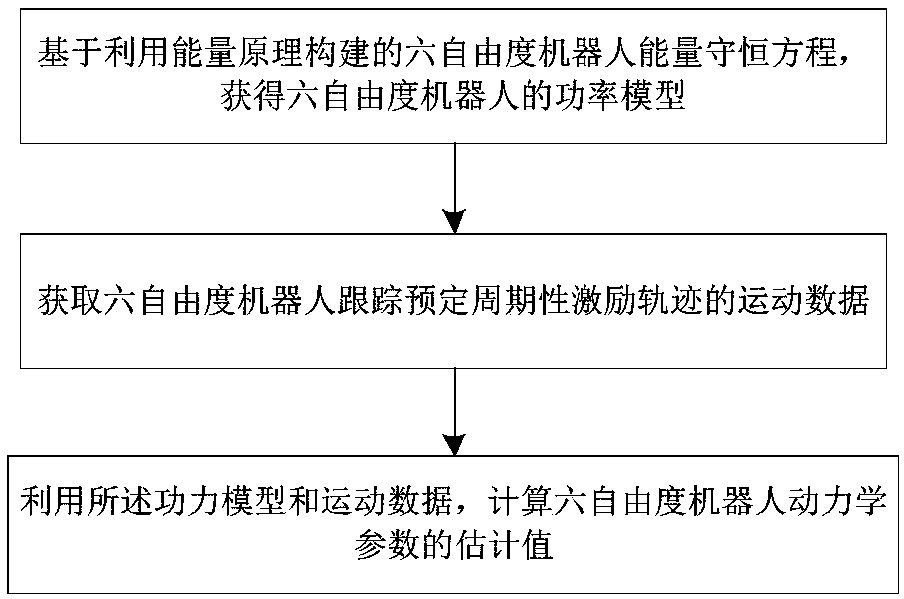
[0023] The core idea of this scheme is that the method starts from the energy principle and derives a power-based parameter identification model to realize the identification of robot dynamic parameters. The derivation process of this method is simple and intuitive, the calculation amount is obviously reduced, and the joint angular acceleration is not required to be calculated, which reduces the influence of noise on the identification results...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



