

Upper limb multi-joint synchronous proportional electromyography control method and system based on muscle synergy
A myoelectric control and multi-joint technology, applied in the field of myoelectric signal processing and myoelectric control, to achieve accurate and stable motion estimation effects, smooth and stable control commands, and strong interactivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
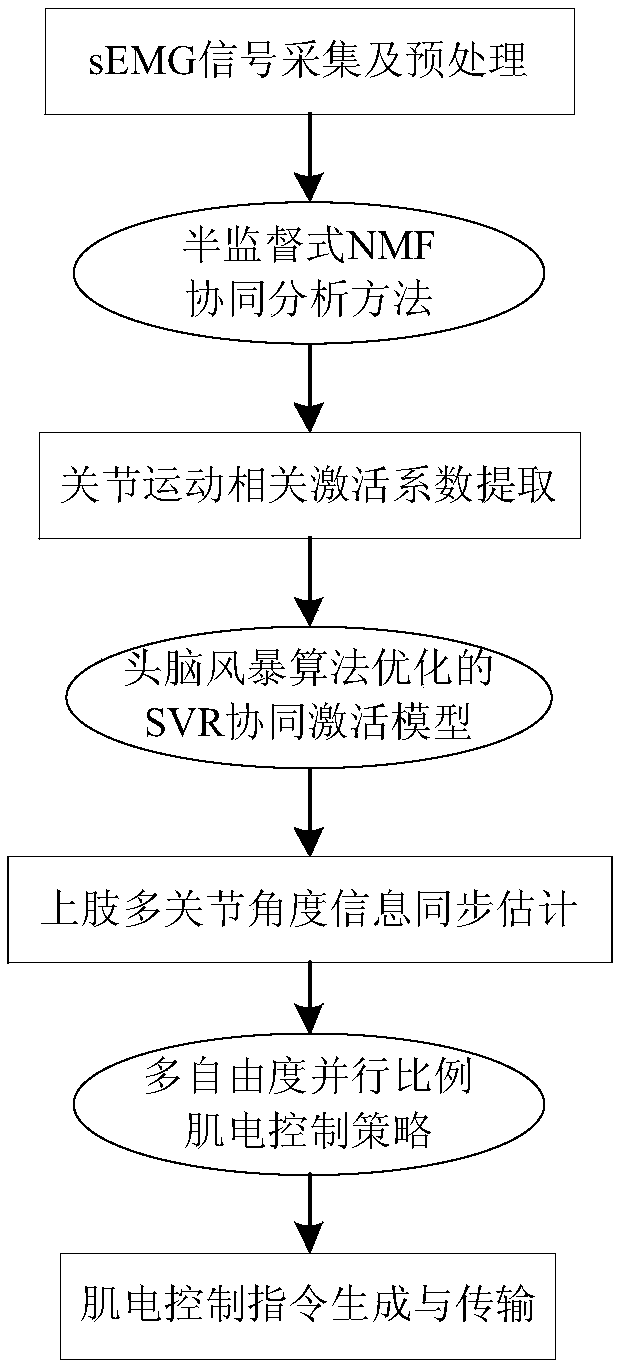
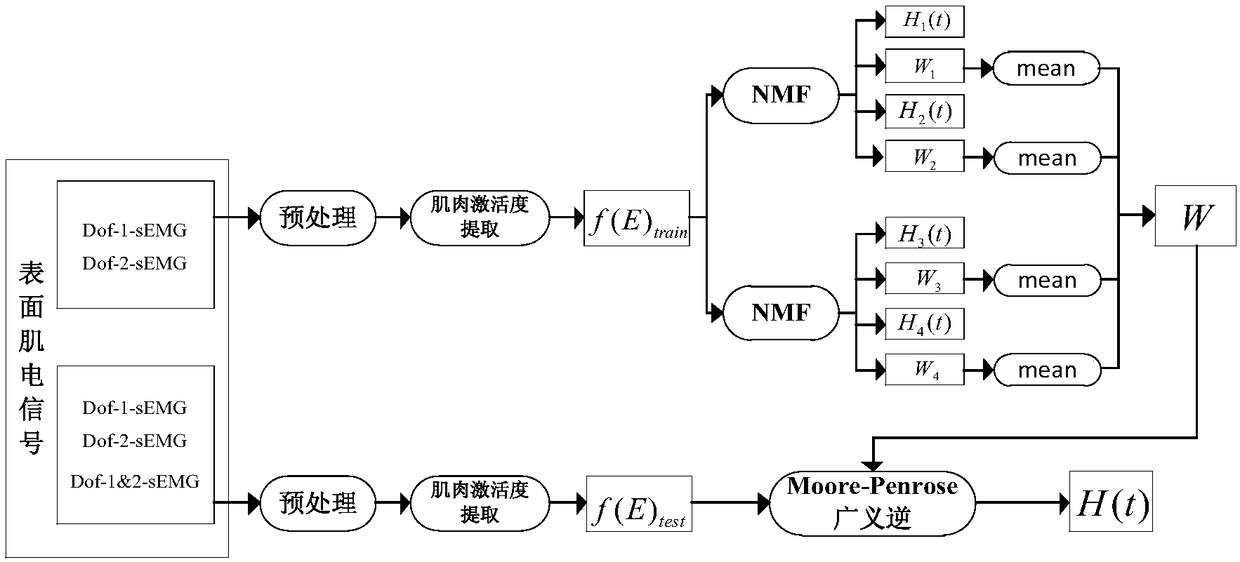
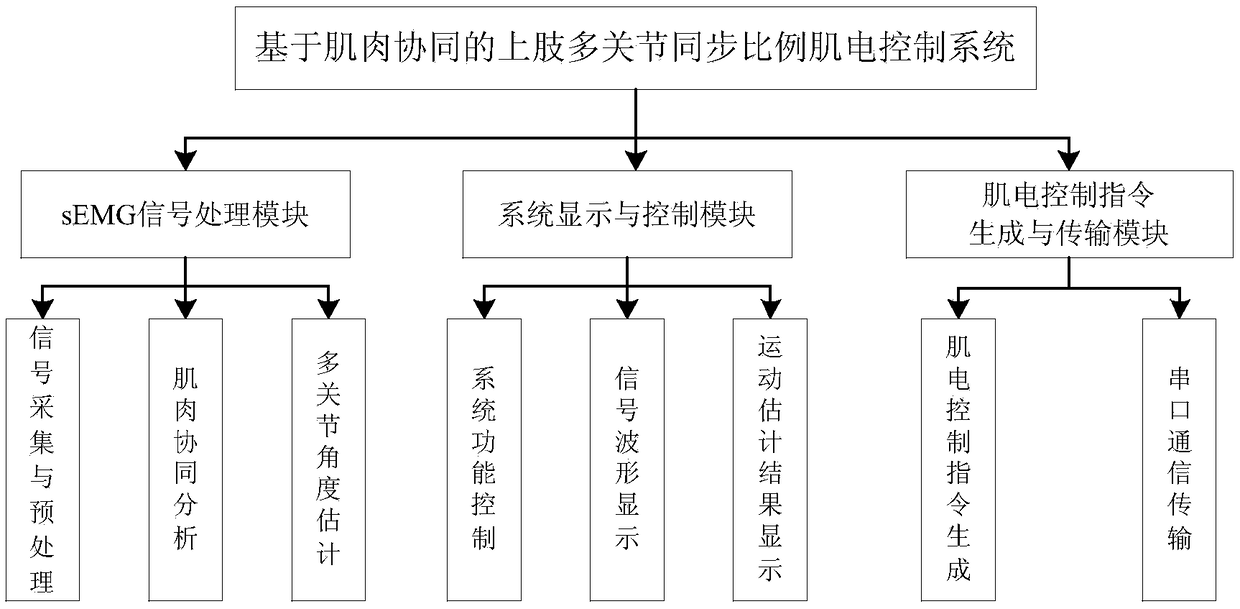
[0031] figure 1 It shows the overall flow of the multi-joint synchronous proportional myoelectric control method based on muscle coordination, and provides a semi-supervised muscle coordination analysis method to extract motion-related activation by using the advantages of muscle coordination contraction theory in solving multi-degree-of-freedom motion problems. coefficient sequence, and build a synergistic activation model through Support Vector Regression (SVR) to simultaneously estimate the motion angle information of the wrist and elbow joints of the upper limbs, and finally combine the multi-degree-of-freedom parallel proportional control strategy to build synchronous proportional EMG for multiple joints of the upper limbs The control system provides smooth and stable motion control commands for smart devices.
[0032] A synchro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More