

Brushless direct-current motor Q learning-based variable domain fuzzy control method
A technology of brushed DC motor and fuzzy control, which is applied in the direction of electric controllers and controllers with specific characteristics, etc. It can solve the problems of controller distortion, small overshoot adaptability, control precision drop, etc., and achieve good dynamic and static Performance, good PID control parameter adjustment effect, and the effect of improving dynamic and static performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
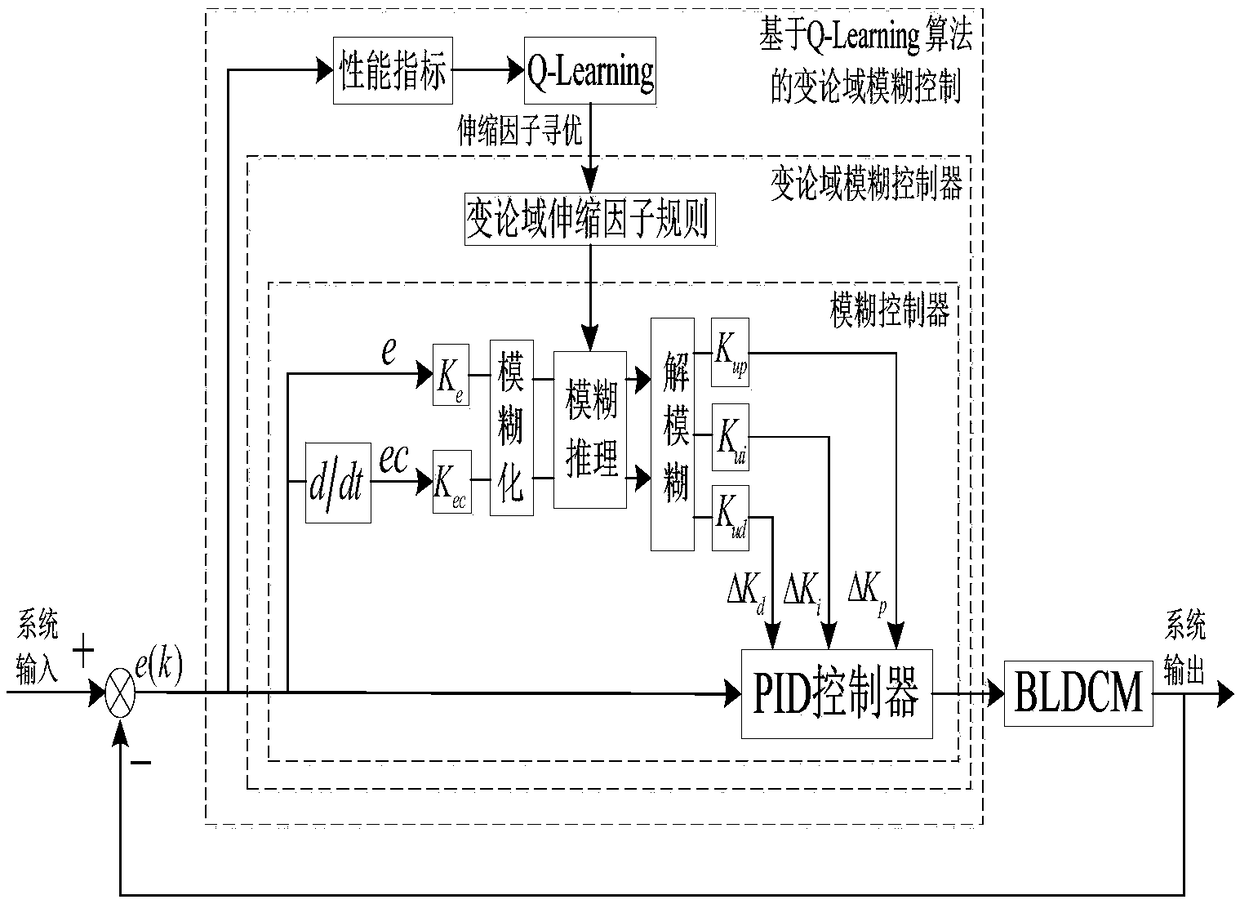
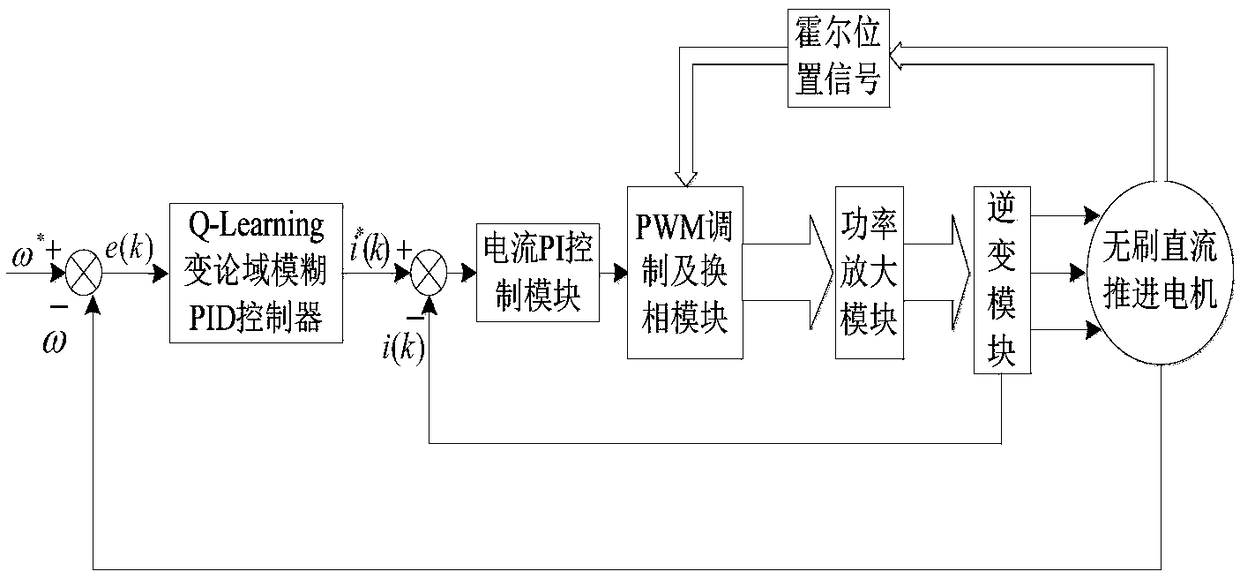
[0037] Such as figure 1 A variable universe fuzzy control method based on brushless DC motor Q-learning is shown. This algorithm mainly improves the dynamic and static state of the BLDCM control system by combining the strong search ability of Q-Learning with the advantages of variable universe fuzzy control. performance and anti-interference ability. The overall block diagram of the variable domain fuzzy PID brushless DC motor control system based on the Q-Learning algorithm designed by the present invention is as attached image 3 As shown, different from the traditional BLDCM control system, the present invention mainly improves its overall performance by introducing the Q-Learning varia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More