

A binocular disparity estimation method based on three-dimensional convolution
A binocular parallax, three-dimensional convolution technology, applied in the field of computer vision, to achieve the effect of improving accuracy and consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the implementation methods and accompanying drawings.
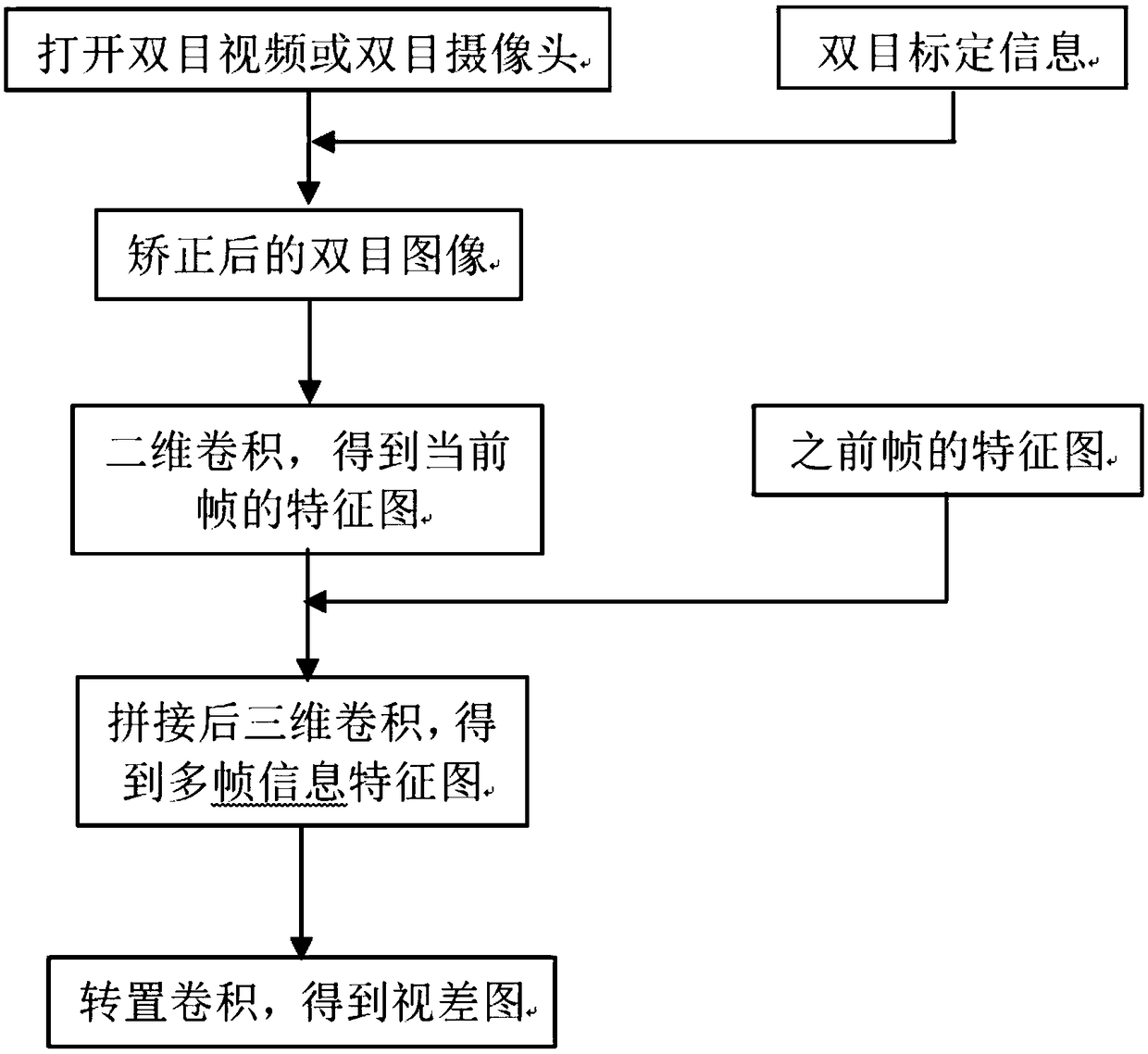
[0018] Compared with the existing binocular disparity estimation method based on convolutional neural network, the present invention extracts information in the time dimension through three-dimensional convolution, and combines the binocular information of the current frame and previous frames to estimate the binocular disparity of the current frame , so as to improve the accuracy of the existing binocular disparity estimation method and the coherence between the front and back frames.
[0019] The present invention first calibrates the binocular cameras, and respectively obtains the internal parameter matrix of the left and right cameras and the external parameter matrix between the left and right cameras.
[0020] Through the internal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More