

Gait rehabilitation training robot
A technology for rehabilitation training and robotics, applied in passive exercise equipment, physical therapy, etc., can solve problems such as hindering patient movement, human-machine interference, and poor flexibility, and achieve improved exercise flexibility, improved man-machine adaptability, and reduced Effect of Correspondence Bias
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
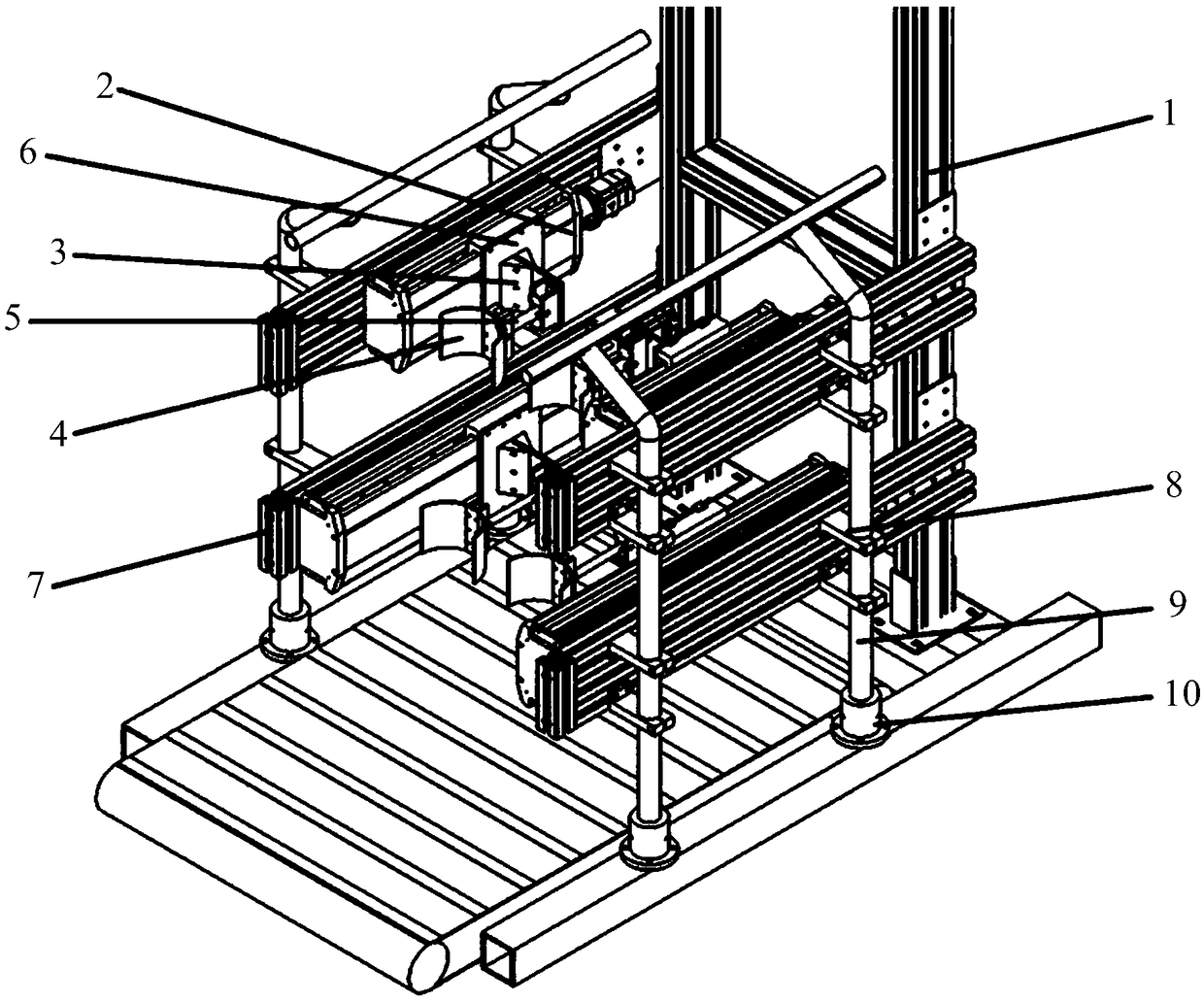
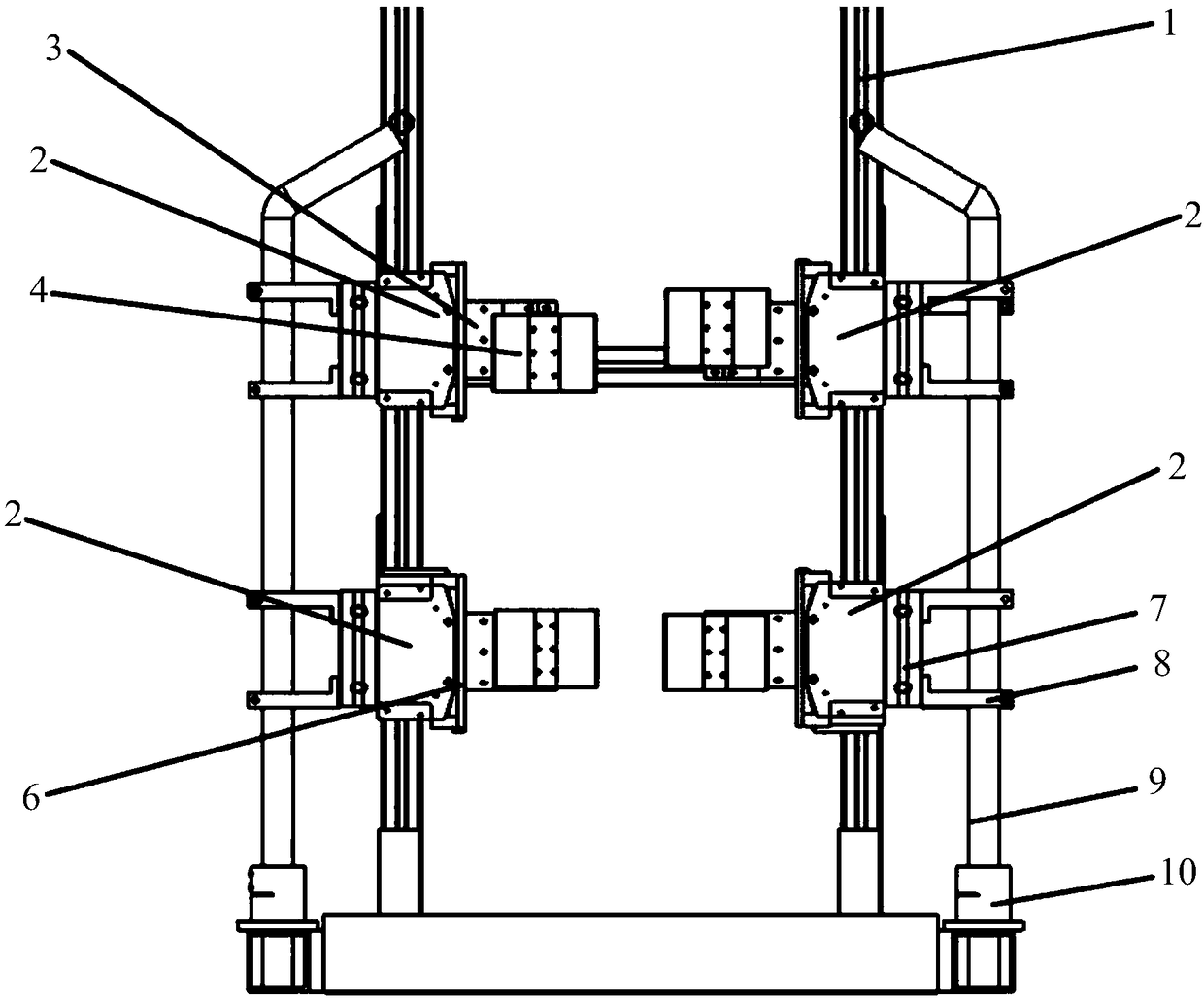
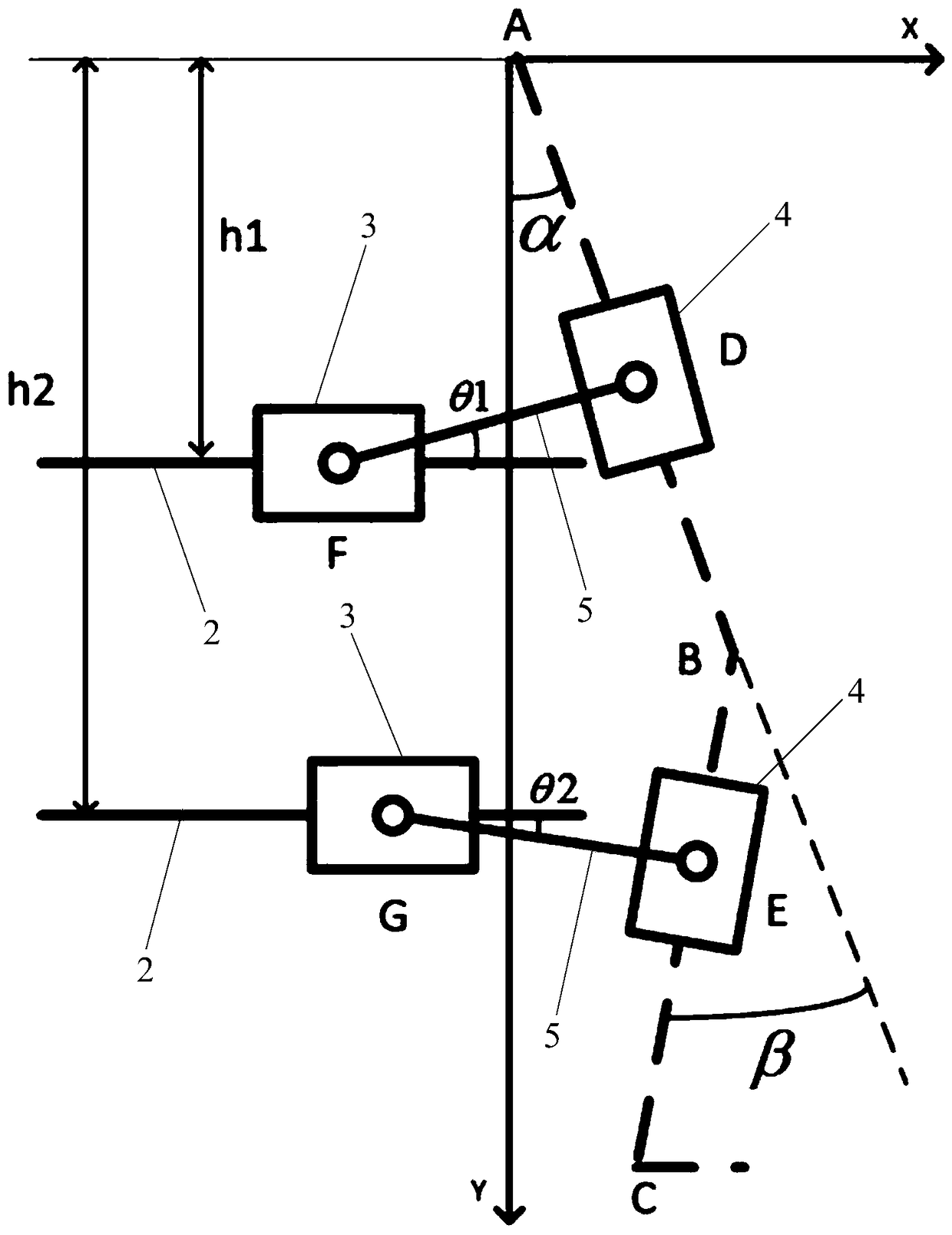
[0032] The invention provides a heterogeneous gait rehabilitation training robot, which uses a reciprocating linear motion mechanism instead of a joint mechanism, simplifies the structure, avoids joint alignment errors, and improves man-machine compliance.
[0033] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0034] Such as Figure 1-Figure 3 As shown, the gait rehabilitation training robot provided by the embodiment of the present invention is used for performing rehabilitation training on the patient's lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More