

Software robot gravity center adjustment device
A center-of-gravity adjustment, robot technology, applied in the field of deep-sea equipment, can solve the problems of inability to withstand high pressure, bulky, large volume and space, and achieve the effect of accurate orientation control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations. Directional terms such as "front", "rear", "left" and "right" in the following description are not to be construed as limiting the present invention. The basic principles of the present invention defined in the following description can be applied to other embodiments, variations, improvements, equivalents and other technical solutions without departing from the spirit and scope of the present invention.
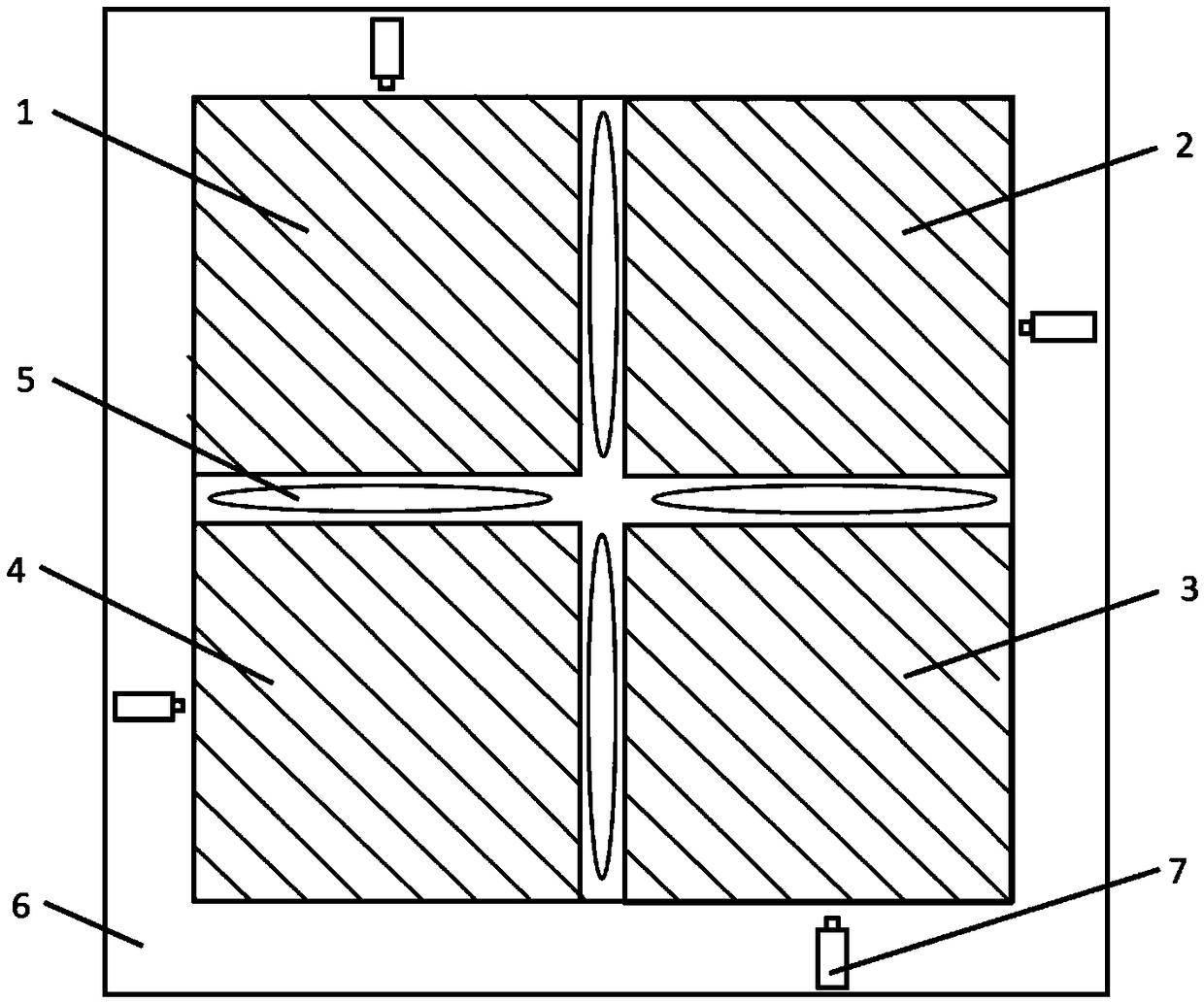
[0022] The center of gravity adjustment device of a kind of soft robot provided by the present invention is described in further detail below in conjunction with accompanying drawing: figure 1 As shown, a center of gravity adjustment device for a soft robot includes a square support 6, four dielectric film ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More