

A six-degree-of-freedom attitude estimation method based on Tag
A technique for pose estimation and degrees of freedom, applied in the field of computer vision, to solve problems such as robustness effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, and the following embodiments do not constitute a limitation of the present invention.
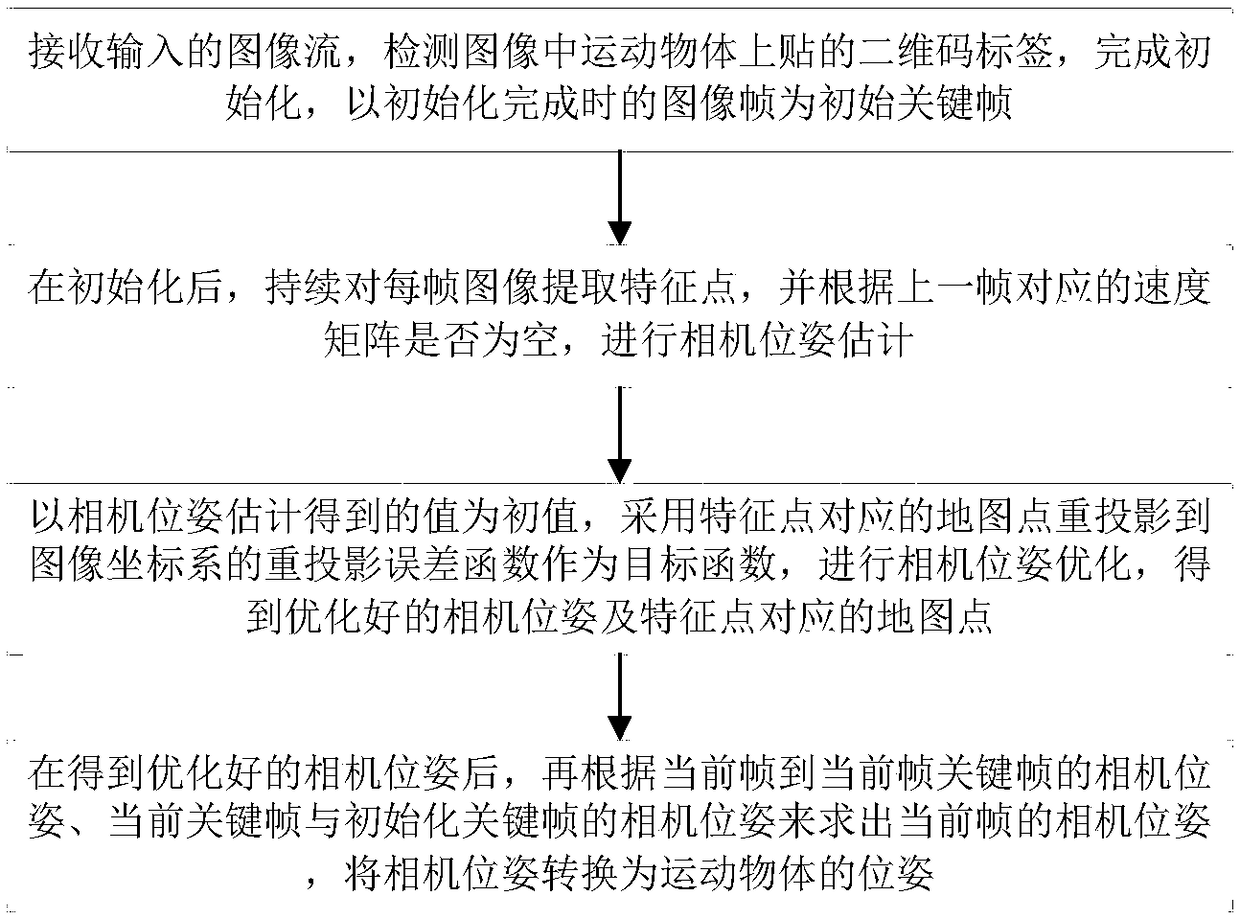
[0035] Such as figure 1 As shown, an embodiment of a Tag-based six-degree-of-freedom attitude estimation method is given. In this embodiment, a two-dimensional code label is attached to the moving object to be estimated, and the two-dimensional code label carries a label identification The QR code information of the number, including the following steps:
[0036] Step S1: Receive the input image stream, detect the two-dimensional code label attached to the moving object in the image, and complete the initialization, using the image frame when the initialization is completed as the initial key frame.
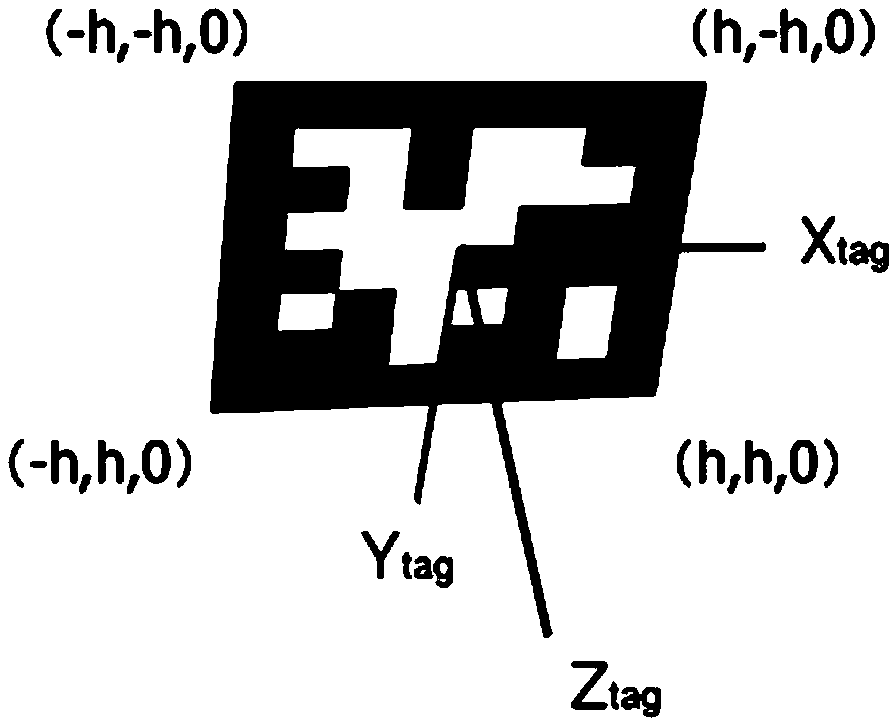
[0037] The initialization process of this embodiment includes: detecting the corner points of the two-dimensional code labels attach...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More