

A Pose Estimation System and Method for Complex Parts Based on 3D Measurement Point Cloud
A technology for complex parts and three-dimensional measurement, which is applied in the direction of measuring devices, instruments, and optical devices, etc., can solve the problems of robot measuring point planning deviation, robot measuring system collision, and large randomness, so as to avoid measurement point cloud splicing errors, Solve pose problems and measure a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
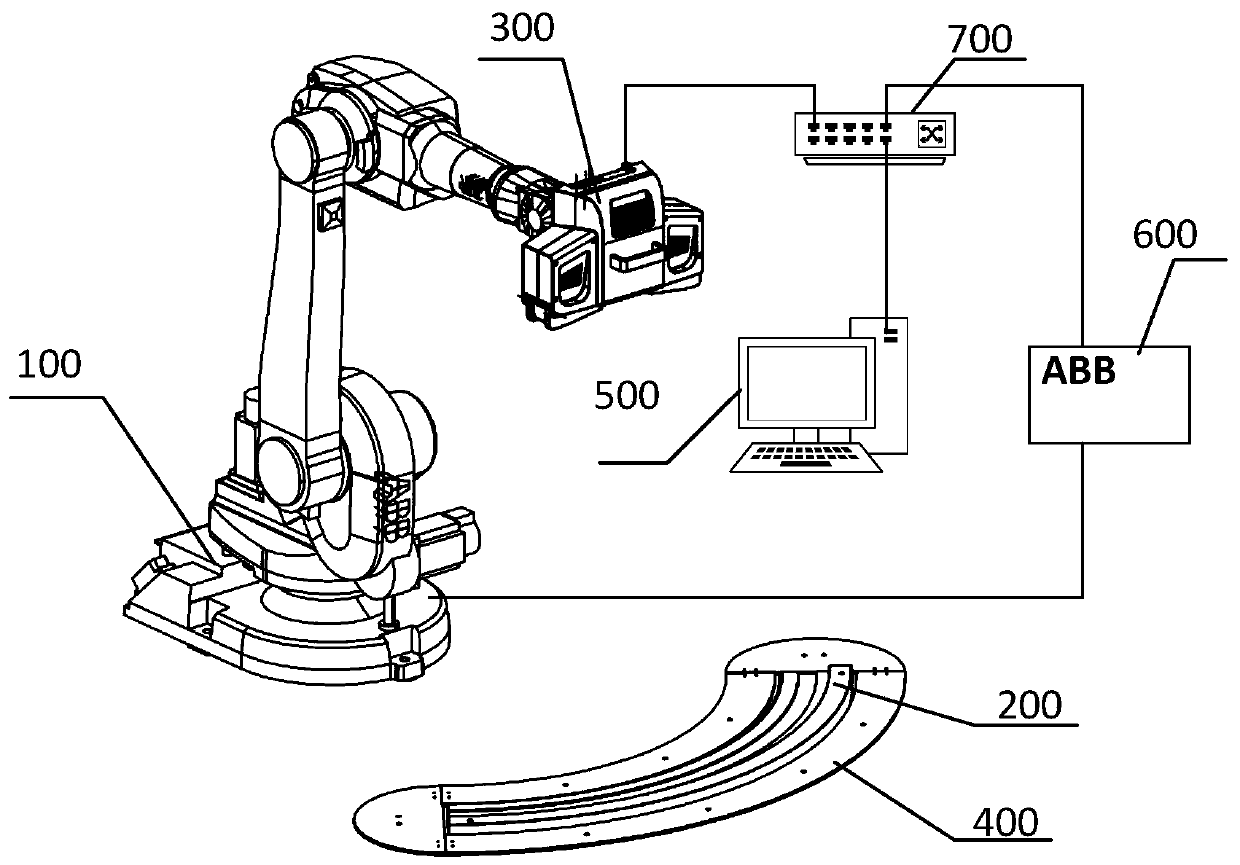
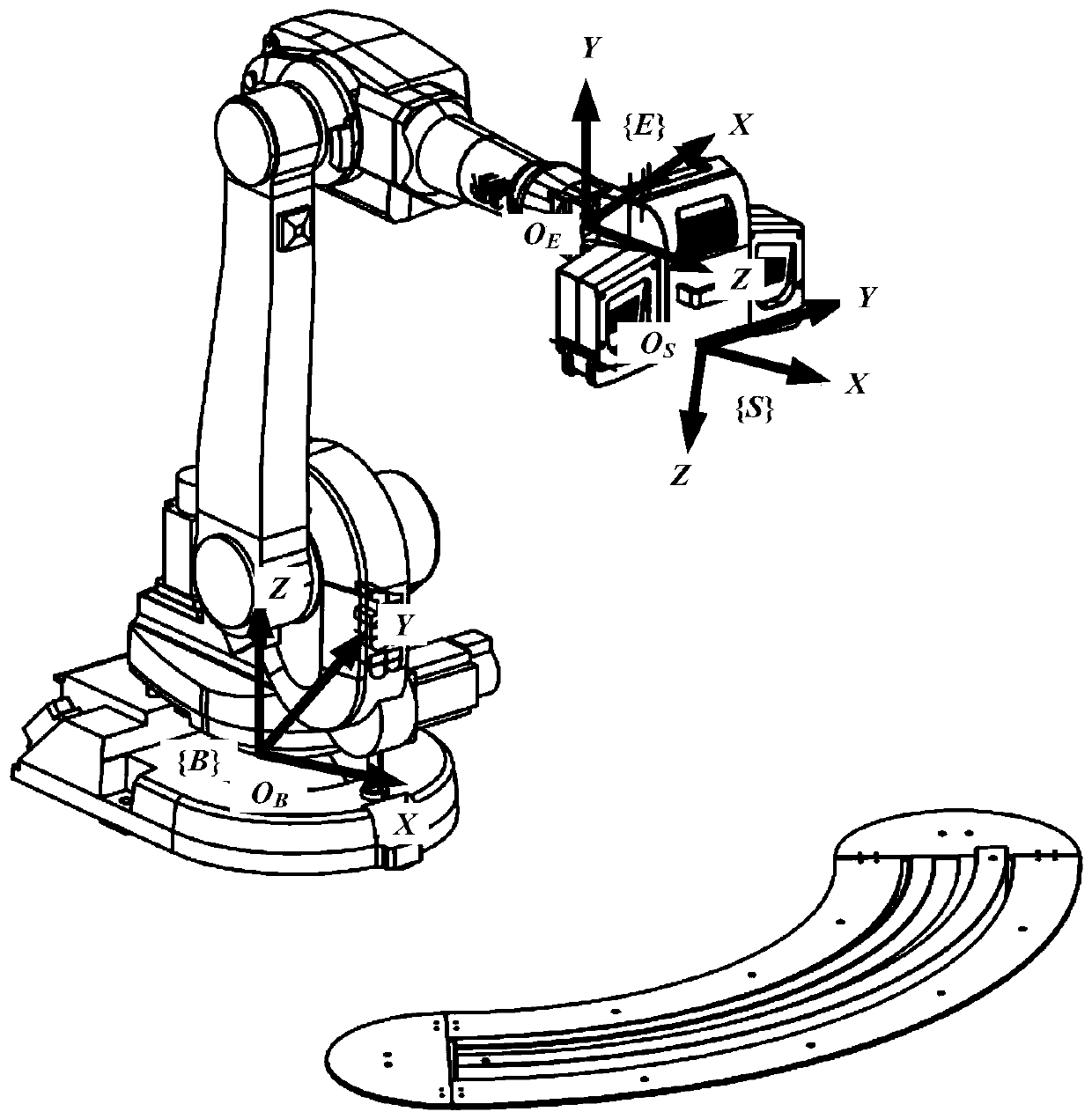
[0033] Such as figure 1 As shown, an embodiment of the present invention provides a complex part pose estimation system based on a three-dimensional measurement point cloud, which includes a six-degree-of-freedom industrial robot 100, a measured workpiece 200, a raster type area scanner 300, and a support frame for marker points 400 and data processing host computer 500.
[0034] The end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More