

Robot used for electric power pipeline inspection
A technology for power pipelines and robots, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high cost, complex structure, measurement deviation of optical equipment, etc., and achieve the effects of convenient operation, high measurement accuracy, and easy control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
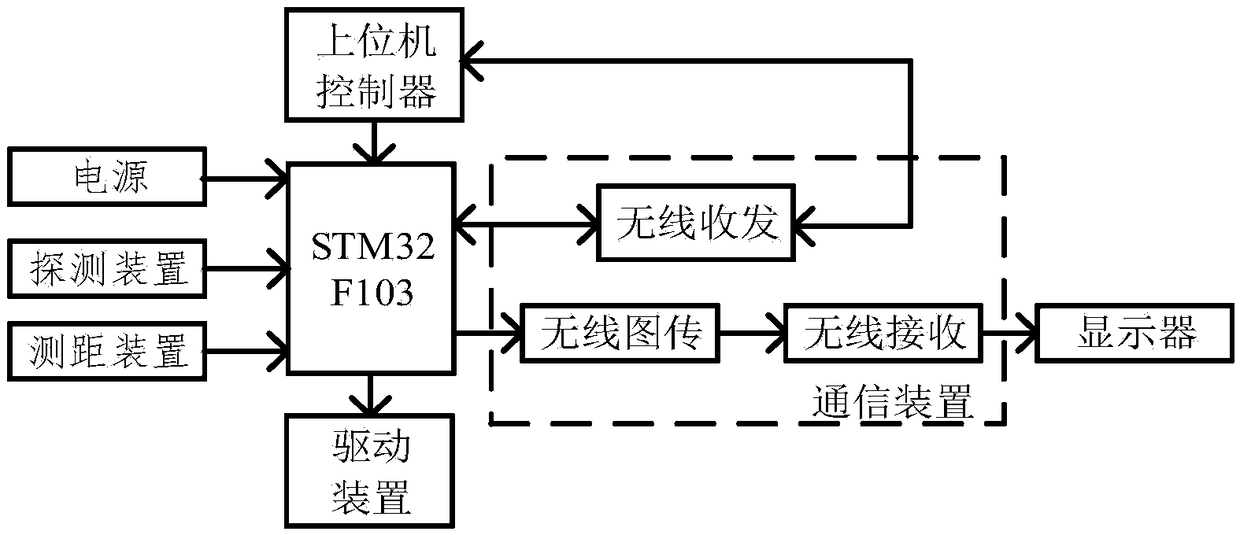
[0029] Such as figure 1 As shown, the present invention relates to a robot for power pipeline inspection, including: a control device for receiving and processing video and ranging signals; a detection device for real-time detection of whether there are cracks or obstacles in the power pipeline and the blocking situation; the distance measuring device is used to measure the distance of the inner wall; the communication device is used to transmit the situation in the pipeline detected by the detection device and the distance signal measured by the distance measuring device, so as to realize the control of the host computer to the robot; and the drive device, It is used to provide power for the robot to travel.
[0030] In this embodiment, the control device includes a controller, using an STM32F103R8T6 chip as the controller, and using a high-definition camera device to transmit the internal image of the pipeline to a monitor within 200m for display in real time through wireles...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More