

Optimal strategy solution of mobile robot in dynamic environment
A mobile robot and optimal strategy technology, applied in data processing applications, forecasting, computing, etc., can solve problems that cannot be transformed into DRA, solutions that cannot be solved, etc., and achieve the effect of wide applicability and good optimal strategy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The LTL-MDP solution of the present invention will be further described through simple examples below in conjunction with the accompanying drawings.
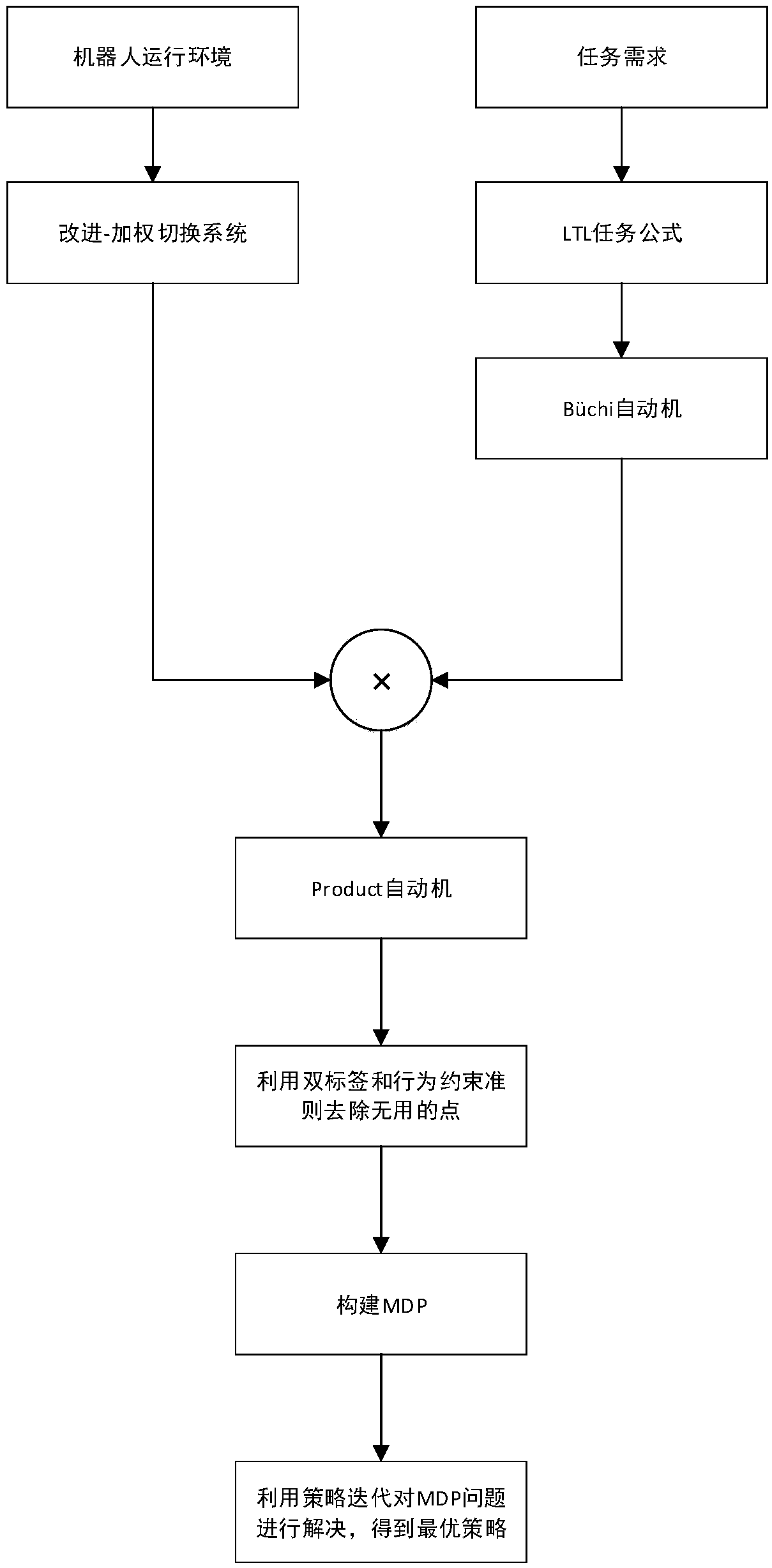
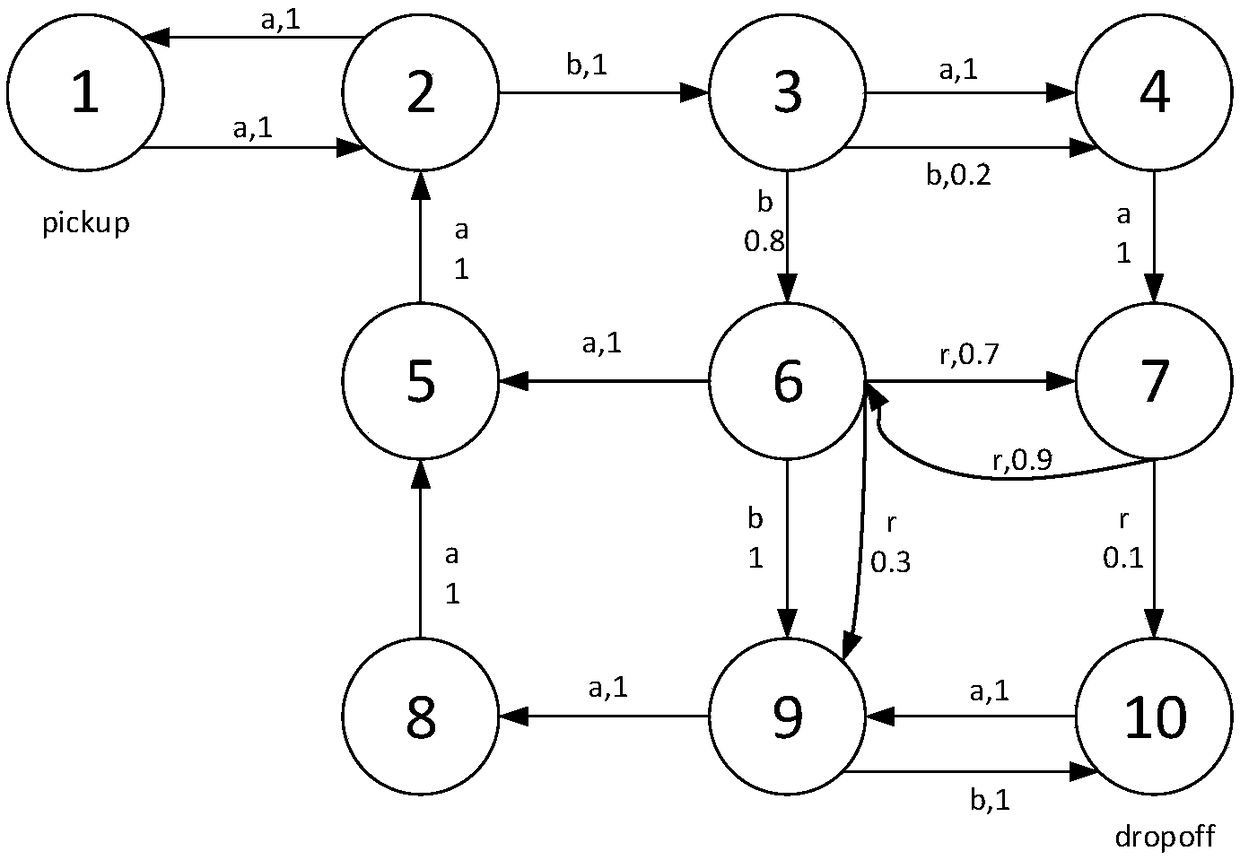
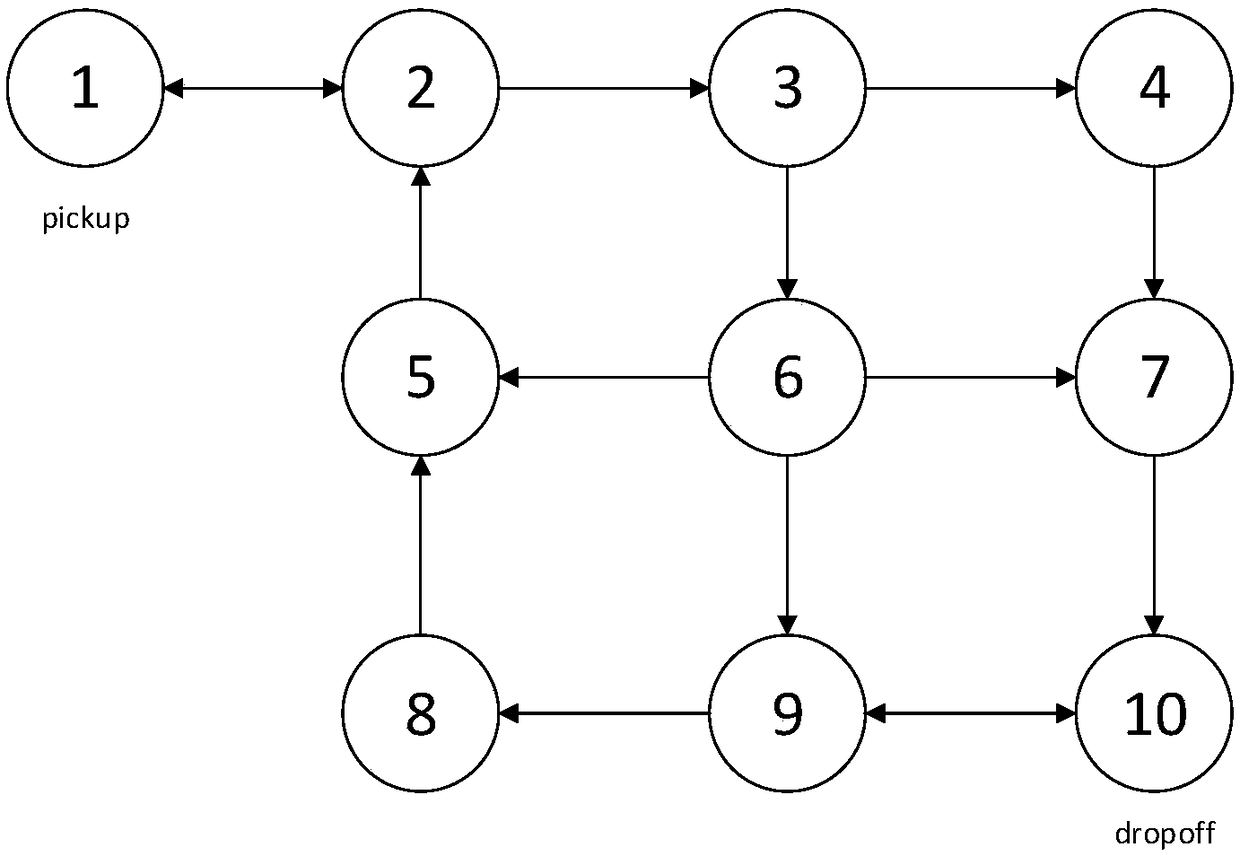
[0030] The flow chart of the invention is as follows figure 1 As shown, first, according to the operating environment of the robot figure 2 , constructing an improved-weighted switching system image 3 , according to the task requirements: after the pickup, the robot must reach the dropoff before returning to the pickup. Similarly, the robot must go through the pickup after the dropoff to return to the dropoff. Use linear temporal logic (LTL) to express the task requirements mathematically, and use the LTL2BA tool The package converts the LTL task formula into a Büchi automaton; then performs Cartesian product of the two to obtain the Product automaton, which contains task requirements and environmental information; removes useless points on the feasibility network topology map (some points only have input or Only the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More