

Manipulator logistics sorting system based on machine vision processing and working method thereof
A machine vision and sorting system technology, applied in sorting and other directions, can solve problems such as restricting the development and efficiency of the express delivery industry, violent sorting, and complex types, so as to facilitate manual inspection and recording, and expand the area of detection and applicability. strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
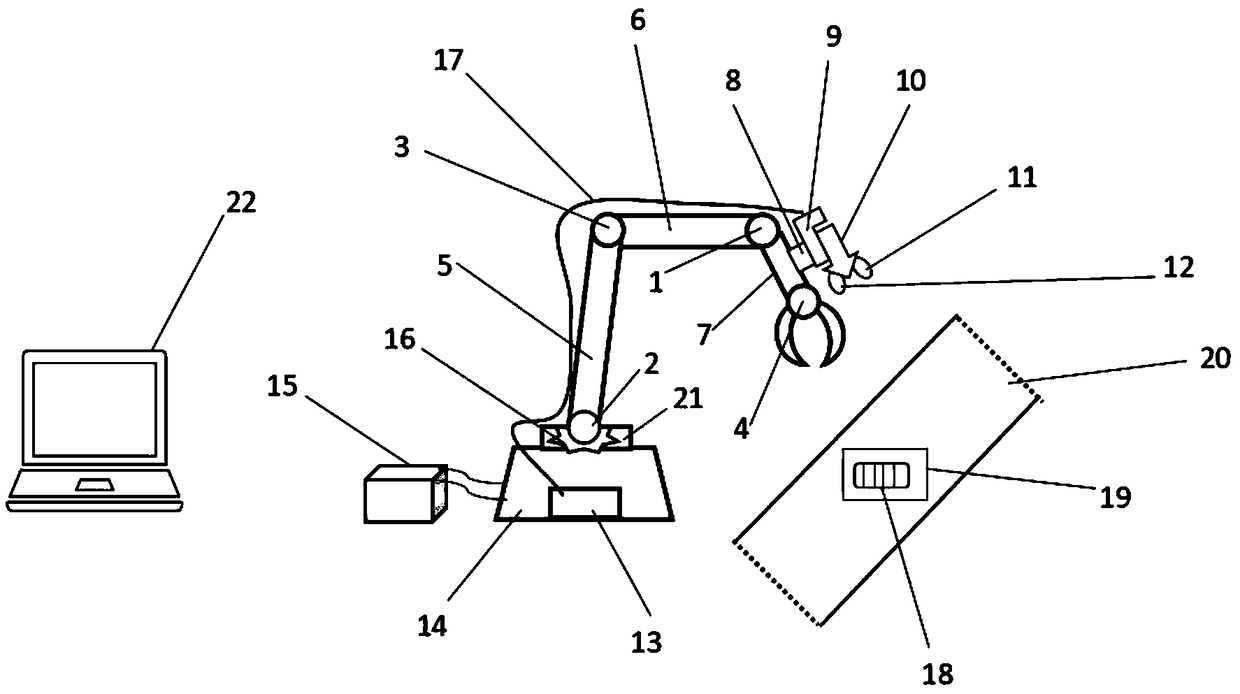
[0031] The present invention will be further described below in conjunction with the accompanying drawings. like Figure 1-3 As shown, the robotic logistics sorting system based on machine vision processing includes a computer 22, a camera and a robot, and the computer 22 communicates with the robot through a wireless communication network; the camera is arranged on the retractable claw of the robot 7, the manipulator is installed on the base 14;
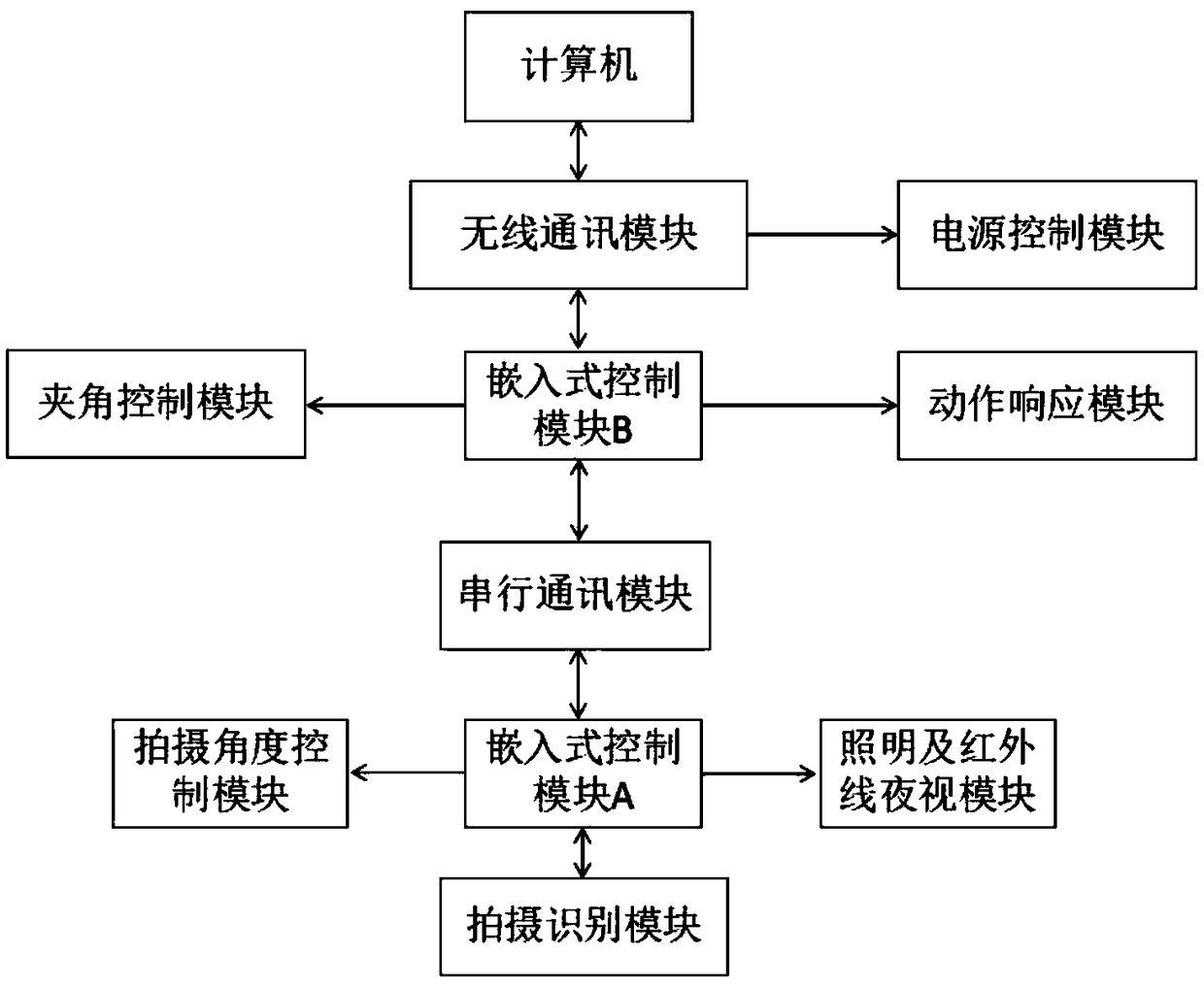
[0032] The camera includes a shooting angle control module, a shooting recognition module, an embedded control module A9 and lighting and an infrared night vision module, and the manipulator includes an action response module, a wireless communication module, an embedded control module B13, a power supply control module , angle control module and serial communication module;
[0033] The computer 22 uses virtual instrument technology as a control and display interface, and communicates interactively with the manipulator through a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More