

Sixteen Position Error Modulation Method for Dual-axis Rotary Inertial Navigation System
An inertial navigation system and dual-axis rotation technology, applied in the field of inertial navigation, can solve the problems of speed accumulation error and suppression of coupling effect not reaching the optimum level, and achieve the effects of reducing accumulation, increasing system cost and complexity, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
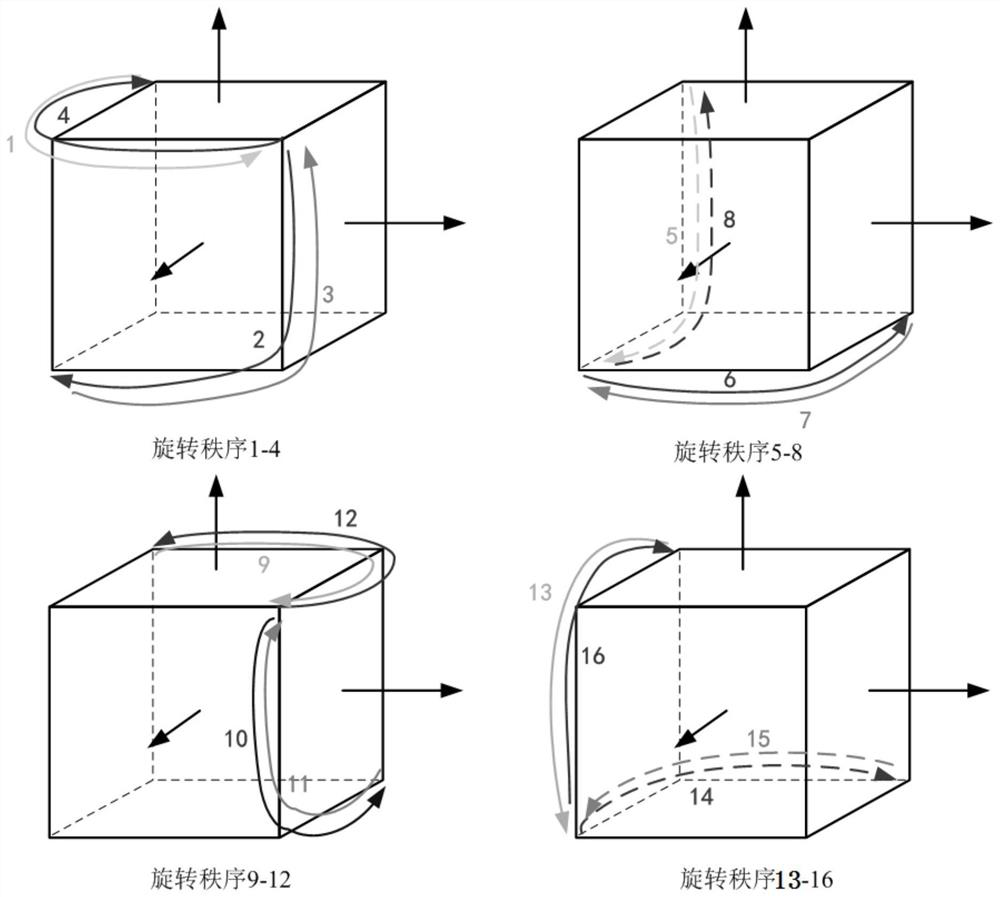
[0067] Such as figure 1 The sixteen position error modulation method of the two-axis rotary inertial navigation system, it includes the following steps:
[0068] Step S11: Determine the carrier coordinate system where the inertial measurement unit of the dual-axis rotary inertial navigation system is located, and determine the center of mass of the inertial measurement unit as the coordinate origin according to the direction in which the dual-axis rotary inertial navigation system is installed on the carrier. In the transverse section of the carrier, the X-axis is selected to point to the right side of the IMU, the Y-axis is to point to the front of the IMU, and the Z-axis is to point to the top of the IMU;
[0069] Step S12: Determine the two rotating shafts that the inertial measurement unit of the rotating inertial navigation system rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More