

The method of rtg visual obstacle detection based on rgb and d information fusion
An obstacle detection and obstacle technology, applied in the field of RTG visual obstacle detection, can solve the problems of short detection distance, inaccuracy, loss of distance information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0098] In order to verify the effectiveness of the algorithm, videos containing different lighting, scenes, and various types of obstacles were actually collected for example verification, including situations with and without obstacles, and each frame of these videos was processed to detect whether There are obstacles and information about obstacles.
[0099] Taking the collected video clip as an example, for each frame of image in the video clip, follow the steps below to detect obstacles:
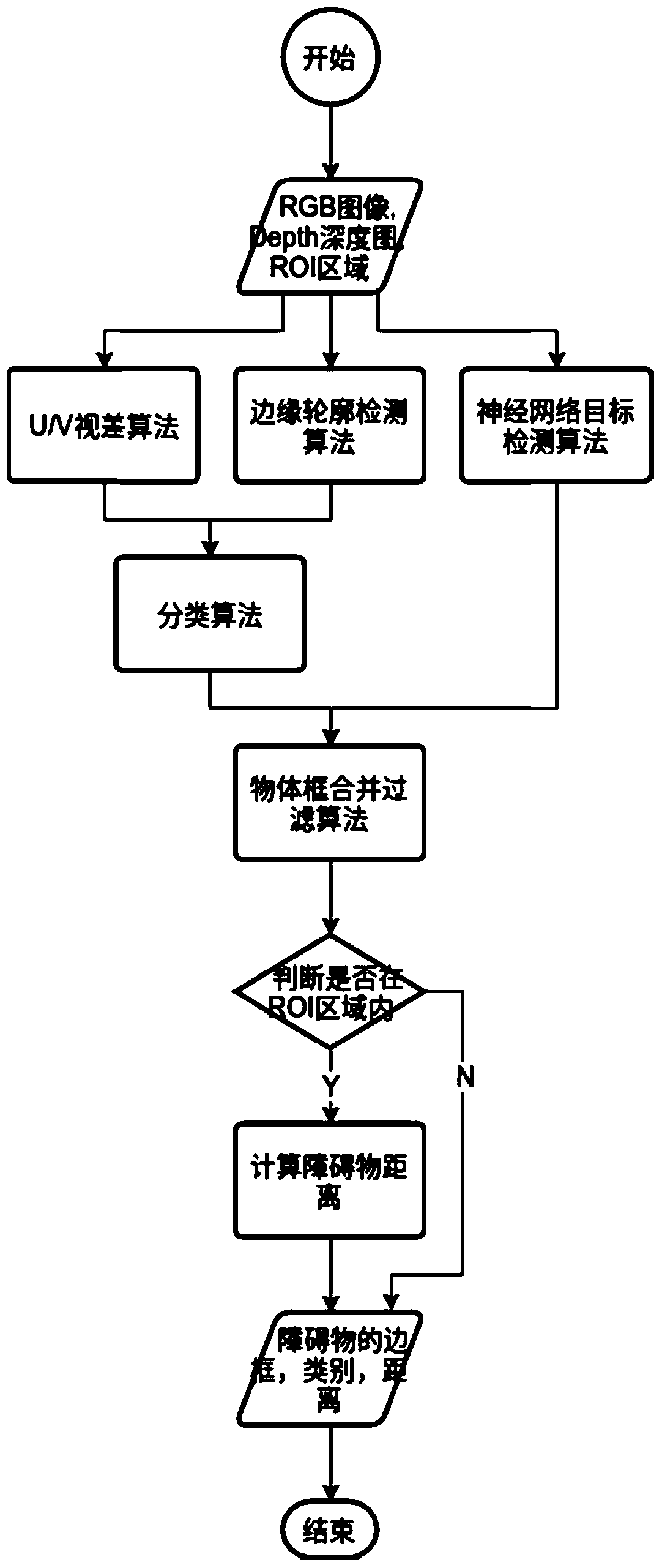
[0100] 1. Obtain the RGB image of the left camera in the binocular camera, the Depth depth image calculated by the binocular camera, and the ROI region of interest that needs to detect obstacles. The acquired image resolution is set to 640*480 pixels;
[0101] 2. Based on the Depth depth map, detect obstacles through the U / V parallax method, and obtain candidate obstacle object frames;
[0102] 3. Perform edge contour detection on the RGB image, detect obstacles, and obtain candidate ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More