

Partial feedback filter method for integrated navigation system
A combined navigation system and partial feedback technology, applied in the field of navigation algorithms, can solve problems such as filter failure, variance matrix distortion, and difficulty in real-time adjustment of filters, and achieve strong adaptability and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
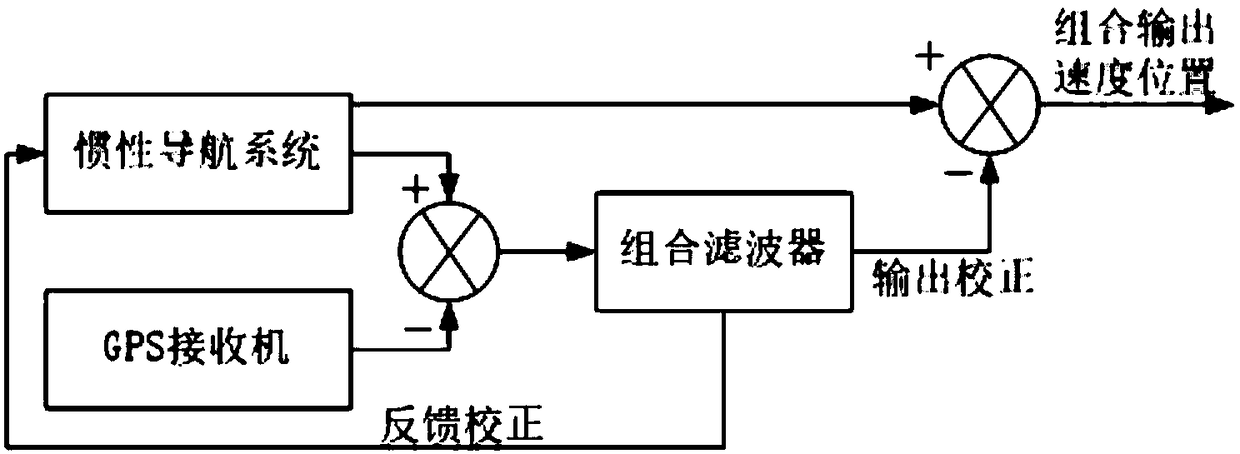
[0020] Specific embodiments: the integrated navigation system adopts linear Kalman filter to filter the observations, and it is necessary to establish the Kalman filter state transition equation and measurement equation of the integrated navigation.
[0021] (1) State transition equation
[0022] X=[φ e φ n φ u δV e δV n δV u δL δλ δH ε x ε y ε z ▽ x ▽ y ▽ z ] T
[0023] The error of the inertial navigation output parameters is taken as the state estimator, and the parameters are: 3 inertial navigation platform angle errors, 3 receiver velocity errors, 3 receiver position errors, 3 gyroscope three-axis zero bias errors and 3 Accelerometer three-axis zero bias error, a total of 15 state estimation parameters.
[0024] (2) Measurement equation
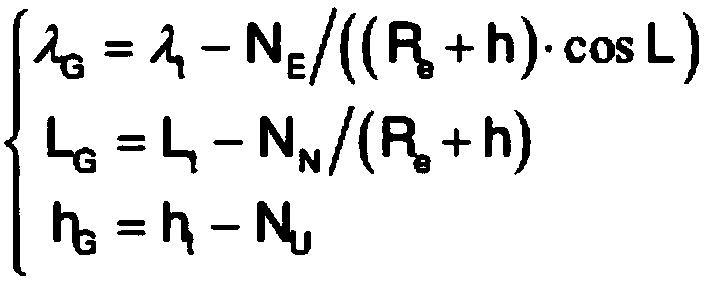
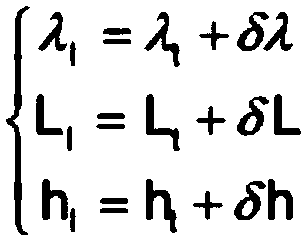
[0025] In integrated navigation, the difference between the positioning and speed-fixing results given by the GPS receiver and the positioning and speed-fixing results of the inertial navigation system is used a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More