

Route planning method, device and system for AGV robot
A path planning and robotics technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of not considering the state information of AGV robots, difficult to meet traffic requirements, and high complexity, and reduce computational complexity and efficiency. Improve and enhance the effect of flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are some, but not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
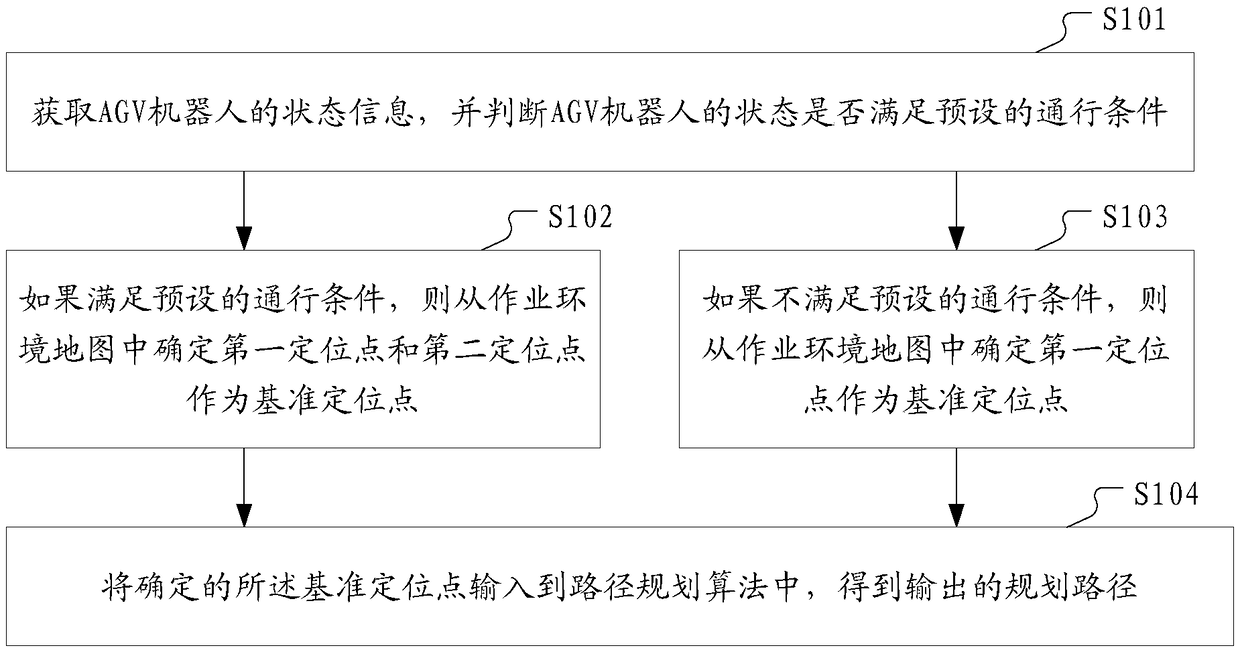
[0041] The design idea of the present invention lies in: most of the path planning methods in the prior art start from the driving direction and use the path planning algorithm to plan the shortest path of the robot, without distinguishing the state of the robot, the calculation is complicated, and it cannot meet the traffic requirements of the robot in some scenarios In order to solve the technical problems, a path planning...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More