

Optimization of an automated process for selecting and gripping an object by a robot
A robot and object technology, applied in the direction of instruments, manipulators, program control, etc., can solve the problems of robot standby time and non-production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In the figures, functionally identical elements are provided with the same reference symbols unless otherwise stated.
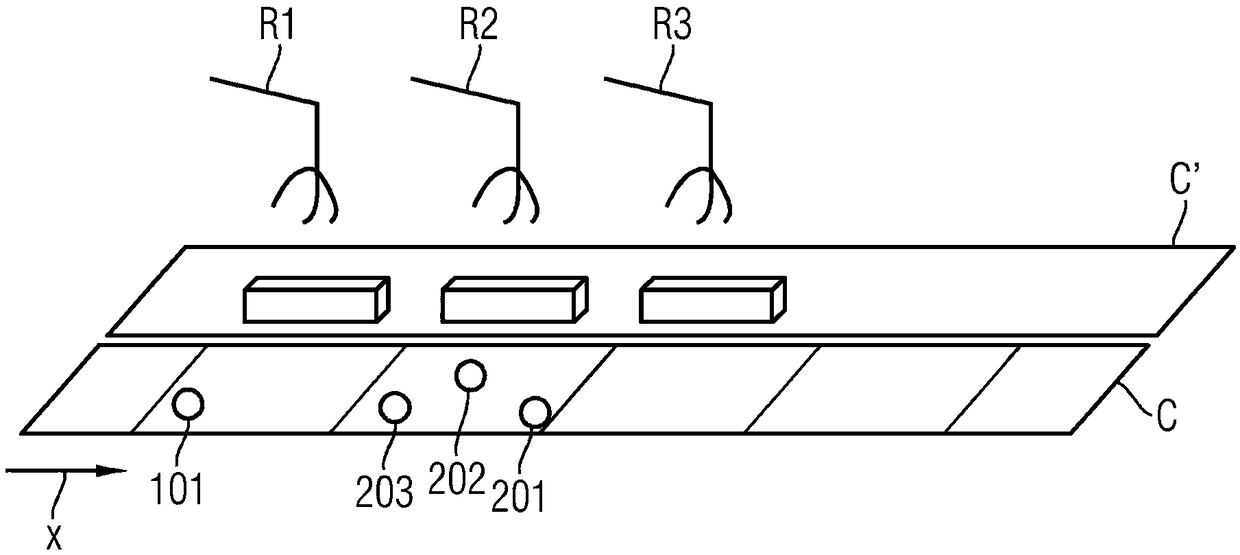
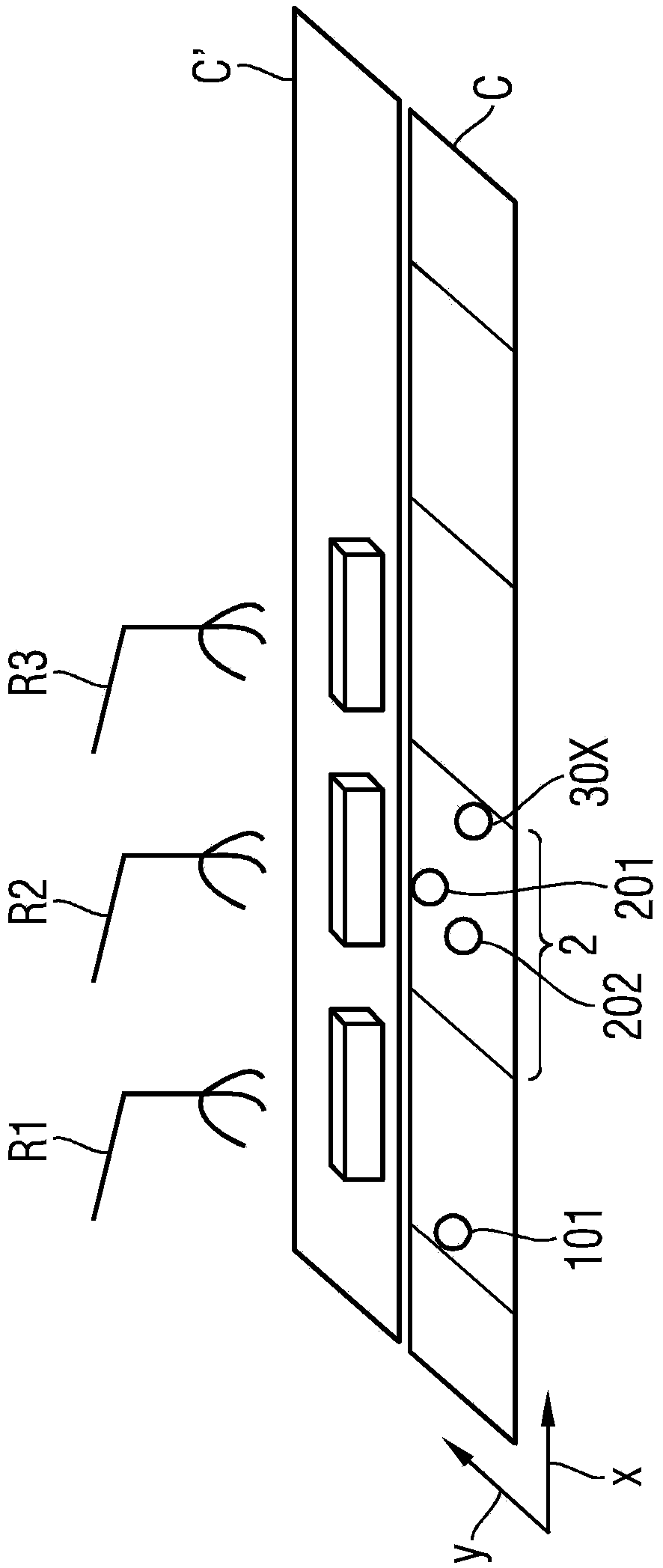
[0040] exist figure 1 How the objects 101 , 203 , 202 , 201 are arranged on the conveyor belt C is schematically shown in . An example would be individual products wrapped in plastic film in a packaging facility, ready to be stacked into cartons. For example every six individual products are packed into a carton and are thus delivered as a product. To this end, objects 101 , 203 , 202 , 201 are picked up from a conveyor belt C by robotic gripping arms R1 , R2 , R3 and lifted into cartons on another conveyor belt C′. For clarity, only a few objects are shown.
[0041] In a real packaging facility, the products appear on the conveyor belt C irregularly and unregulated. For example, they fall off a conveyor belt that was previously in the manufacturing facility. For example in the last step of the process a plastic film is wound around the product an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More