

Multi-laser radar data fusing method with obstacle memory function
A technology of radar data and fusion method, which is applied in the direction of electromagnetic wave re-radiation, instruments, measuring devices, etc., can solve problems such as lack of consideration, decreased frequency of message release, and impaired memory function, to solve a large number of noise points and reduce frequency of message release Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
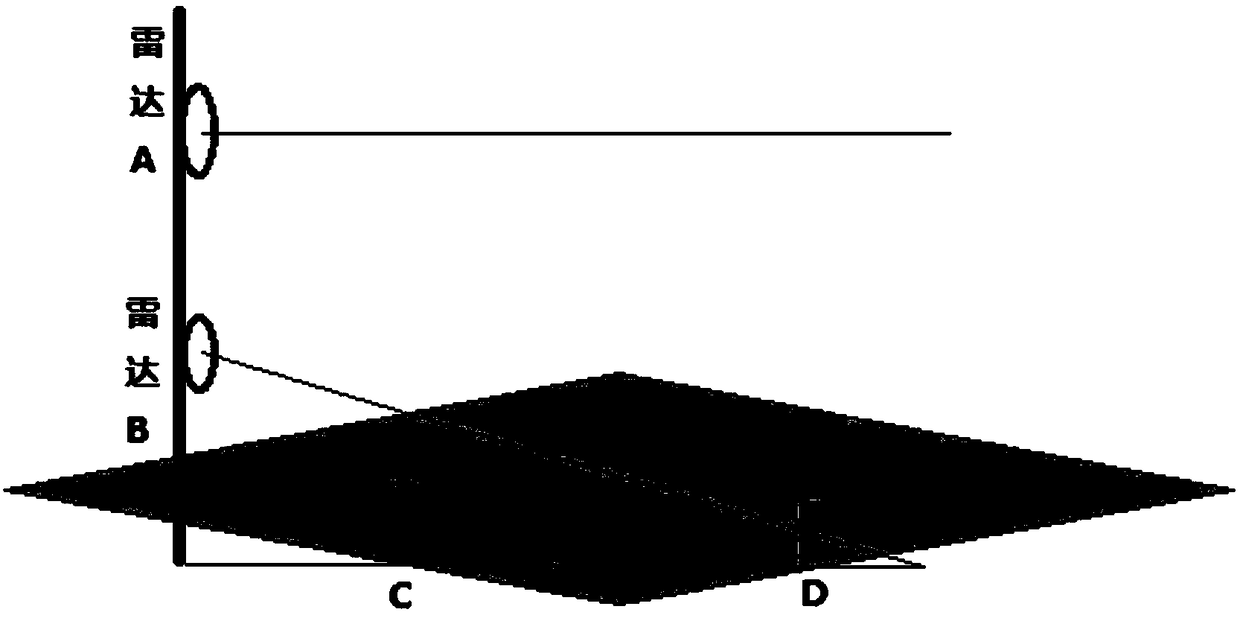
[0040] Such as figure 2As shown, lidars A and B are located on different horizontal planes. For obstacles higher than lidar A, lidars A and B are visible at the same time; for objects lower than lidar A and larger than lidar B, only lidar B is visible , lidar A is invisible; for obstacles lower than the height of lidar B, lidar B is visible when it is far enough away from the obstacle, but when the distance between the robot and the obstacle is continuously shortened to exceed the distance threshold, the obstacle is invisible .
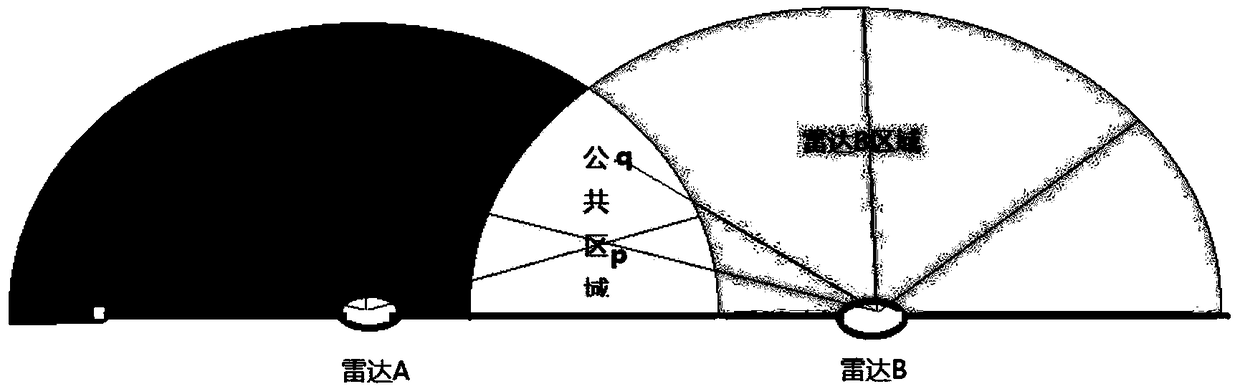
[0041] The surrounding environment of the robot can be divided into three areas: the single visible area of a single laser, the public visible area of lasers and the invisible area of all lasers. The signal distribution projected on the horizontal plane is as follows: image 3 shown.
[0042] For the single visible area of a single laser, there is no need to consider the data fusion problem, and the single laser data shall prevail directly....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More