

Square root volume fuzzy adaptive Kalman filtering SLAM method
A fuzzy adaptive, Kalman filtering technology, applied in navigation computing tools and other directions, can solve problems such as poor positioning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to further explain the technical means and effects of the present invention to achieve the intended purpose of the invention, the specific implementation, structure, features and effects of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
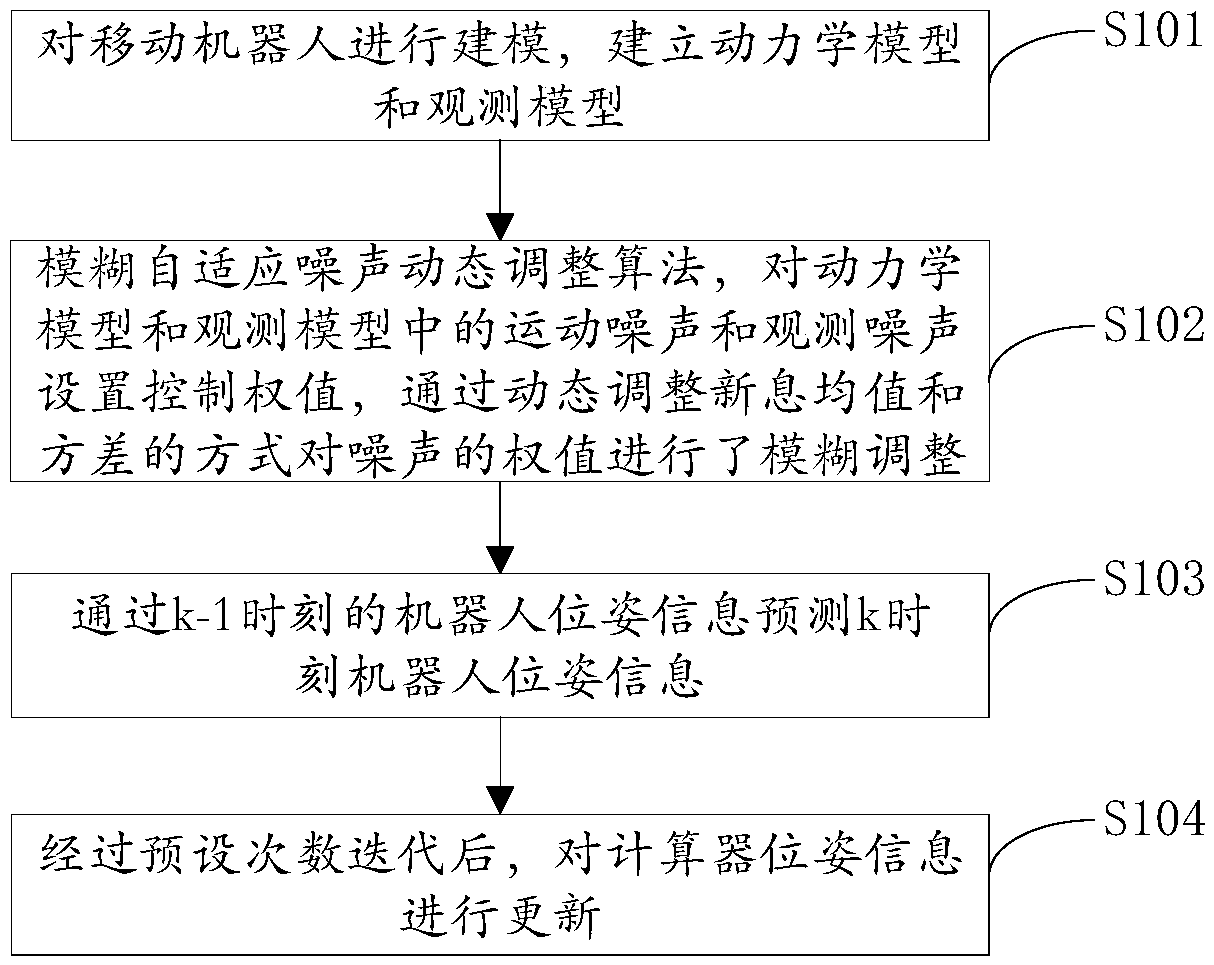
[0080] see figure 1 , is a flow chart of the first embodiment of the square root volume fuzzy adaptive Kalman filter SLAM method of the present invention, in the first embodiment of the square root volume fuzzy adaptive Kalman filter SLAM method, the method includes the following steps:
[0081] Step 101, modeling the mobile robot, establishing a dynamic model and an observation model;
[0082] Step 102, the fuzzy adaptive noise dynamic adjustment algorithm, setting control weights for the motion noise and observation noise in the dynamic model and observation model, and fuzzy adjustment of the noise weights by dynamically adjusting the mean valu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More