

A virtual assembly method based on augmented reality and mobile interaction
A mobile interaction and virtual assembly technology, applied in the field of virtual assembly, can solve the problems of parts damage, limited observation range, inconvenient observation, etc., and achieve the effect of expanding the operating space, expanding the field of vision, and expanding the operating space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
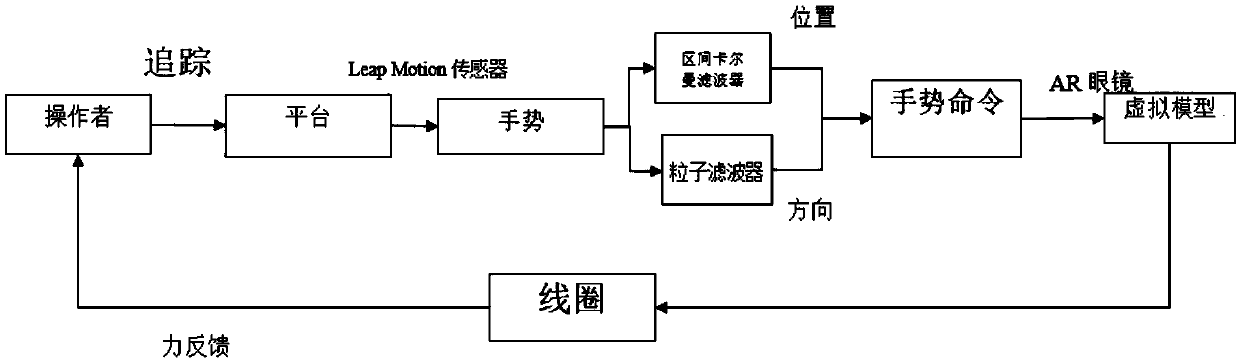
[0025] The specific implementation of the present invention will be further described below in conjunction with accompanying drawing and example, but implementation and protection of the present invention are not limited to this. It should be pointed out that, if there are processes (such as interval Kalman filter and particle filter algorithm) that are not specifically described in detail below, those skilled in the art can understand or implement them with reference to the prior art.
[0026] At present, there are some virtual assembly methods, but there are still some defects in some aspects that are worth improving. Part of the current virtual assembly technology is realized by using computer simulation technology. The virtual assembly realized by this method is not convenient for the operator to observe the assembled parts. The angle of observation is fixed and the scope of observation is limited. Therefore, in the assembly process Problems may occur in . The other part ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More