

A non-feature matching motion trajectory optimization method and system
A technology of motion trajectory and optimization method, applied in the field of people flow statistics, which can solve the problems of low matching accuracy, large amount of calculation, and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The implementation of the present invention is described below through specific examples and in conjunction with the accompanying drawings, and those skilled in the art can easily understand other advantages and effects of the present invention from the content disclosed in this specification. The present invention can also be implemented or applied through other different specific examples, and various modifications and changes can be made to the details in this specification based on different viewpoints and applications without departing from the spirit of the present invention.
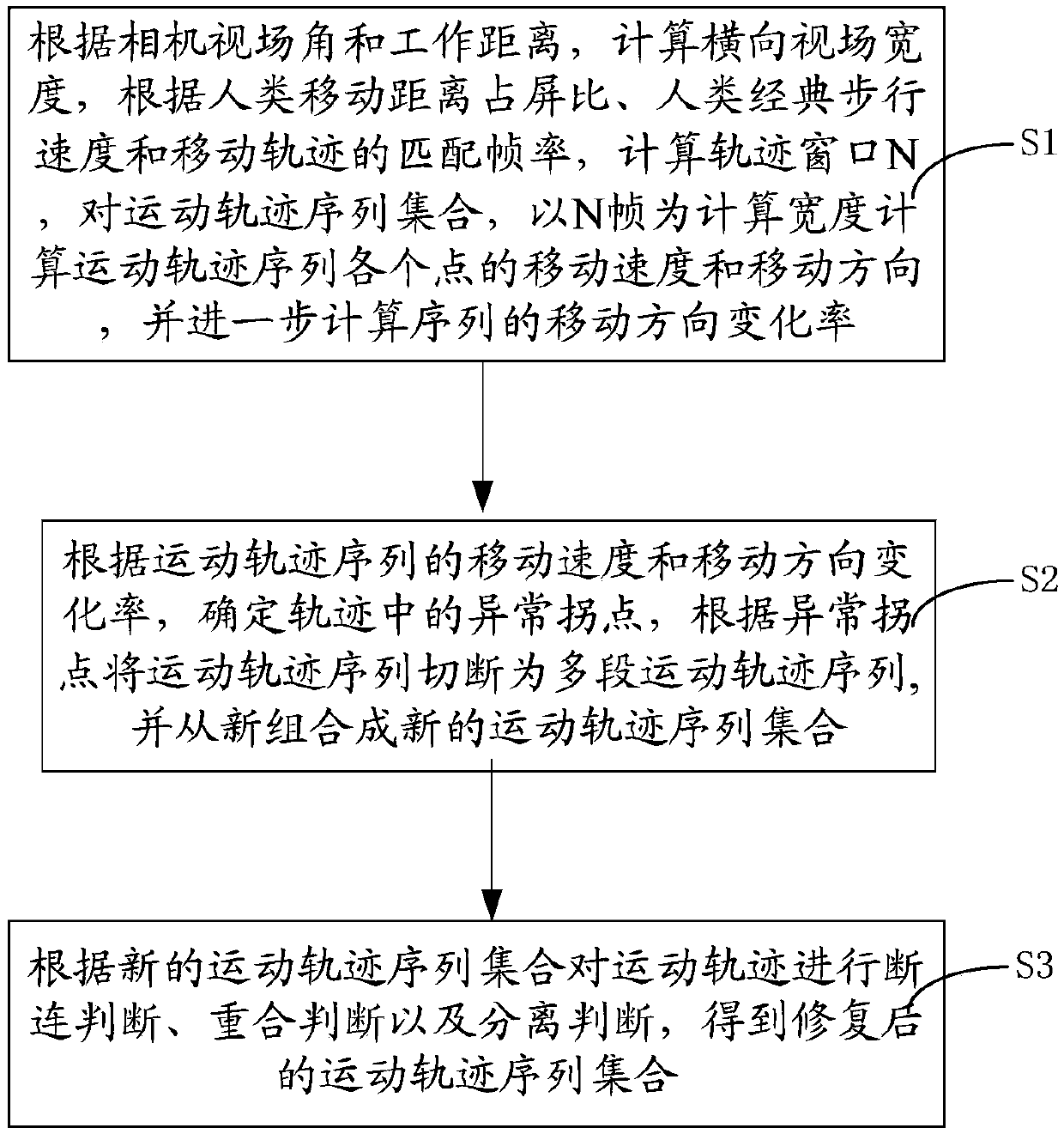
[0062] figure 1 It is a flow chart of the steps of a non-feature matching motion trajectory optimization method of the present invention. Such as figure 1 As shown, a kind of non-feature matching motion track optimization method of the present invention comprises the following steps:
[0063] Step S1, calculate the horizontal field of view width FW according to the camera field of view FO...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More