Exoskeletal gloves with simultaneous finger position measurement and fingertip force feedback
A technology of synchronous measurement and exoskeleton, applied in the field of human-computer interaction wearables, can solve problems such as complex structure, bloated drive structure, hidden safety hazards, etc., and achieve the effect of simple structure and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with accompanying drawing:
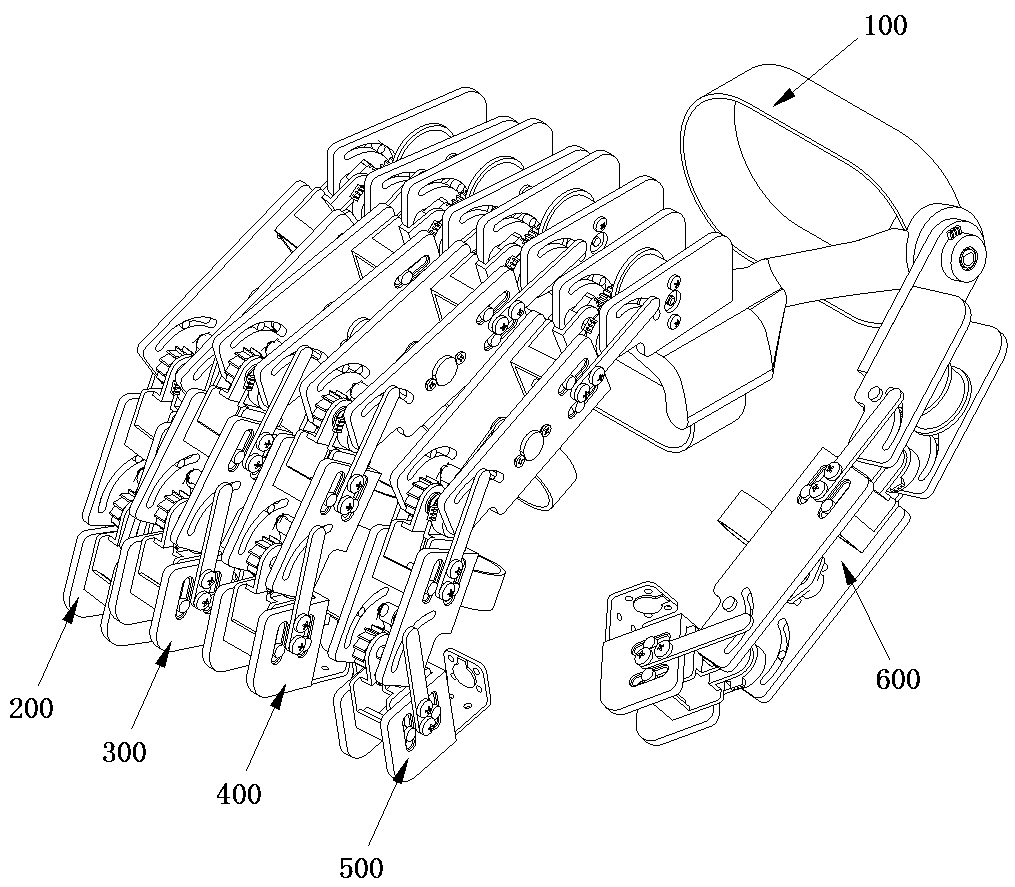
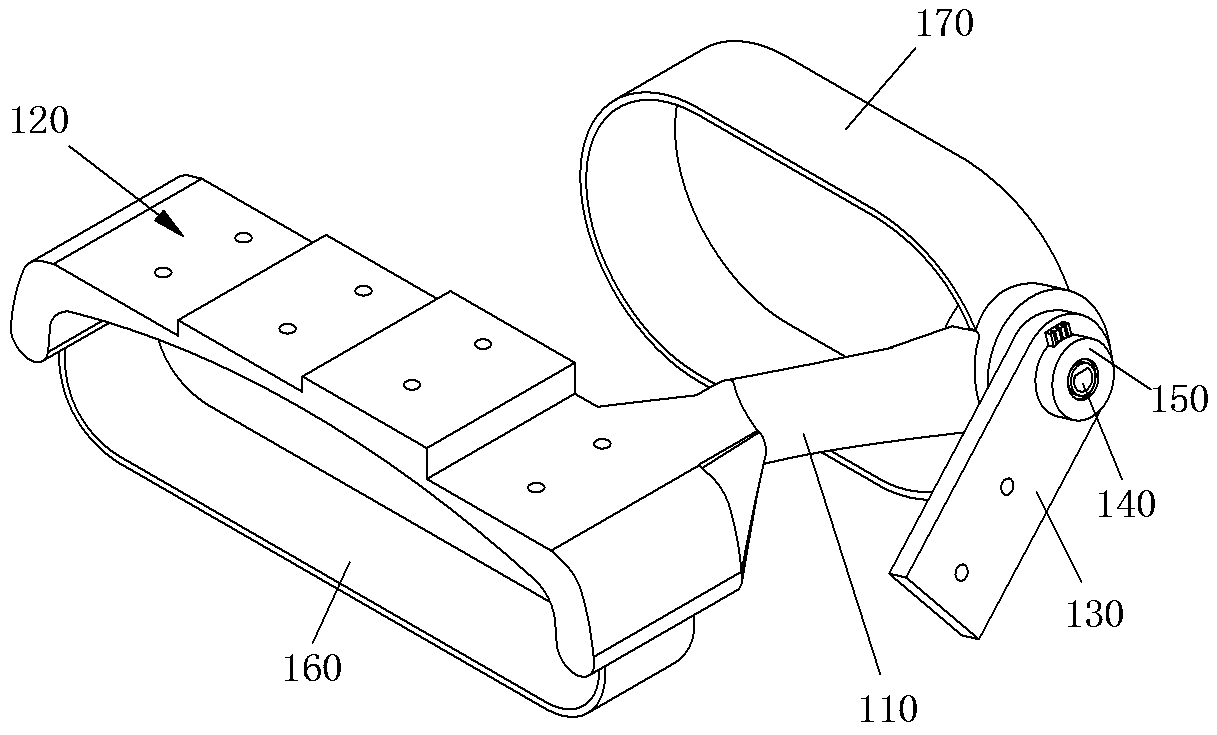
[0034] like figure 1 The shown exoskeleton glove with synchronous finger position measurement and fingertip force feedback function includes a back-wrist wearable device 100 and a little finger exoskeleton mechanism 200 and ring finger exoskeleton mechanism 300 respectively fixed on the back-wrist wearable device 100 . Middle finger exoskeleton mechanism 400, index finger exoskeleton mechanism 500 and thumb exoskeleton mechanism 600, wherein:
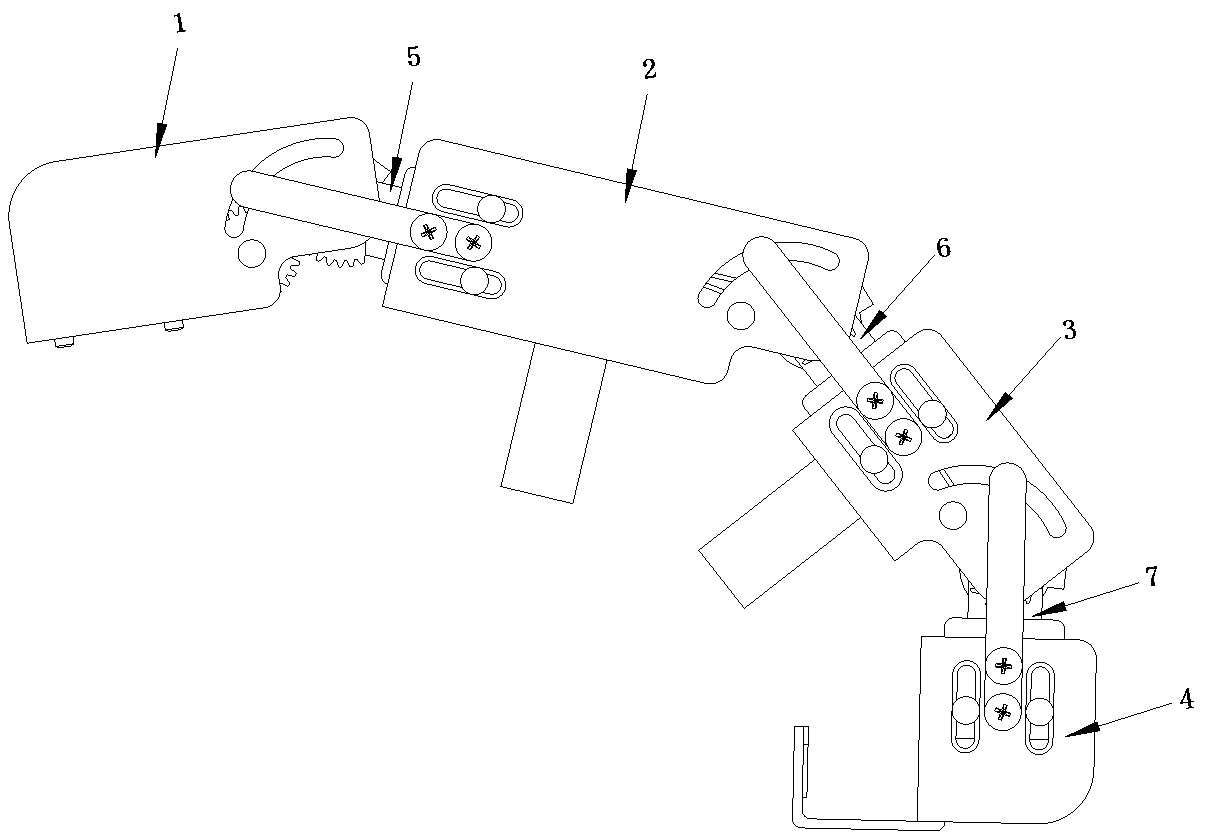
[0035] like image 3 , Figure 4 As shown, the exoskeleton mechanism 200 for the little finger, the exoskeleton mechanism 300 for the ring finger, the exoskeleton mechanism 400 for the middle finger, and the exoskeleton mechanism 500 for the index finger are all three-knuckle exoskeleton mechanisms. Proximal phalanx exoskeleton 2, middle phalanx exoskeleton 3 and distal phalanx exoskeleton 4, between metacarpal exoskeleton 1 and p...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap