

An asynchronous on-line calibration method for multi-sensor fusion
A technology of multi-sensor fusion and calibration method, which is applied in the field of asynchronous online calibration of multi-sensor fusion, and can solve the problems of time synchronization and complex process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings.
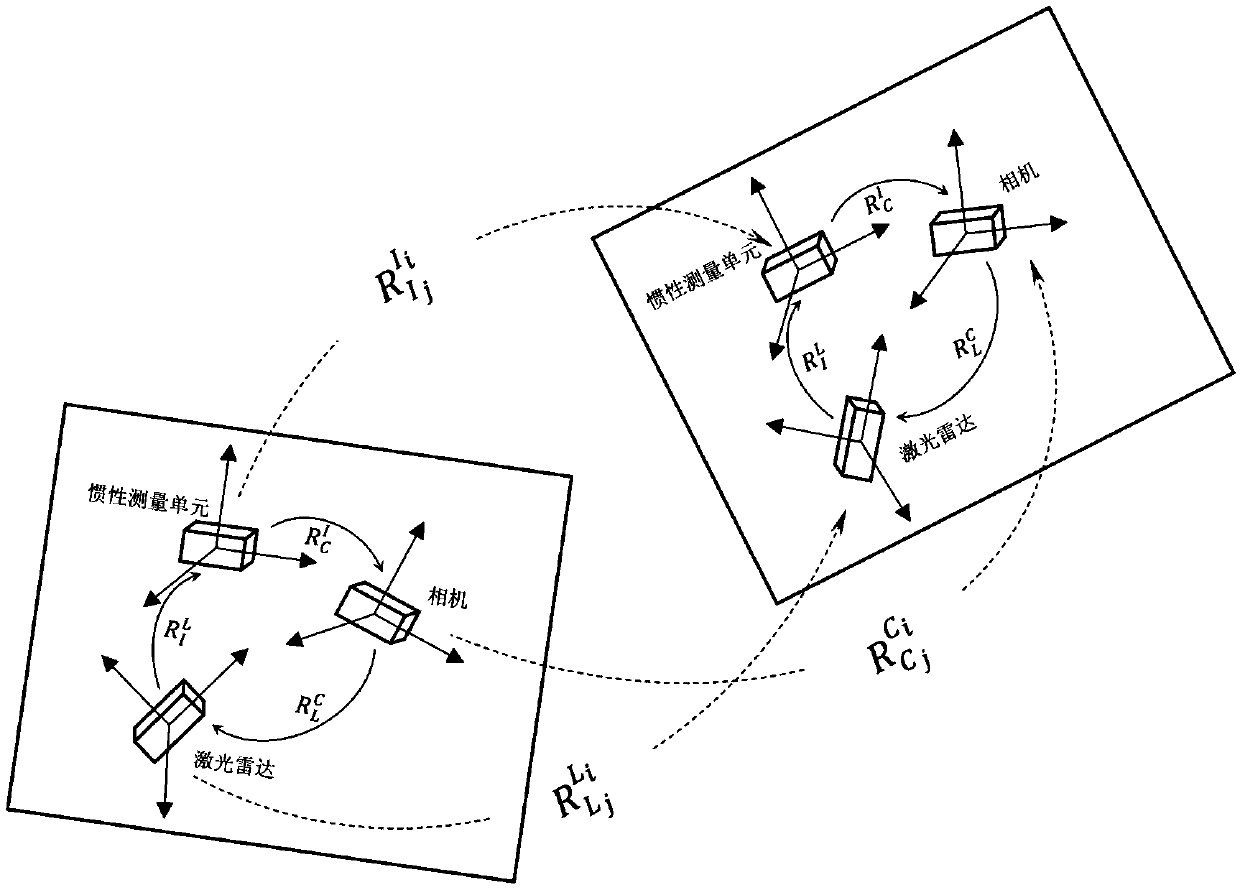
[0073] refer to Figure 1 ~ Figure 4 , an asynchronous online calibration method for multi-sensor fusion, comprising the following steps:
[0074] An asynchronous online calibration method for multi-sensor fusion, comprising the following steps:
[0075] 1) Calculate the rotation of the camera
[0076] Let point P be a point in the camera coordinate system, whose coordinates are [x y z] T , set point p 1 ,p 2 are point P in graph F i , F j projection in C i ,C j are the camera coordinate systems at time i and time j respectively, using the pinhole camera model, the scale-independent expression is obtained:
[0077] p 1 =KP
[0078] p 2 =K(RP+t) (1.1)
[0079] where K is the internal reference matrix of the camera, R and t are from C i to C j The rotation matrix and translation vector of are converted to get the epipolar constraints:
[0080]
[0081]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More